8. Open source hardware: from fibers to fabric
PLUG - IN System : for an autonomous and open Tricotin
Test Nema 17 + Tricotin
VIDEO
Crazy test …
VIDEO
Tricotin
Tricotin + Plug in (Boxn°1)
1 Nema 17 motor
To Find the good place for the motor, I need to find the good duo between the 4 wires. For this I take the multimeters and put it on ohm.
Test the curent 1 grey/yellow + red/green
Test the curent 2 grey/green + jellow/red
To find the twin
The good duo are the images where I find a positive value.
2 Current and power supply
3 TEST GrblShield v5b Synthetos with an Arduino uno
gShield Synthetos 3 motors
add the motor
test with the power supply
The first test was not conclusive because the code for Gshield was not good and not very clear, I don’t understand witch value we need to change and how it works. The motor move but it don’t make a whole tour.
4 TinyG Synthetos
We change the driver with TinyG.
TinyG 4 motors
Plug tow motors
5 To put live in Nema 17 motors we find the Freeware CoolTerm but it work with the drivers FTPI.
Instal FTPI drivers
Steps
Informations to change for CoolTerm in the Settings
code
7 Step to download the code for the motors.
8 Tricotin
I would like to hack the Tricotin to make it autonomous.
For this I open it.
The product
Opened with all pieces
The piece what I make is to change the #HANDLE. The manivelle is the start of the macanism with two #gears inside the Tricotin.
9 The adaptator for the Tricotin
3D modeling
To make the piece I take all dimensions
Handle
The Motor NEMA 17
Step 1 the motor part
Piece 1
Pieces 2 make a notch for the elasticity
Design for the 3D printing
After the first Print I take the piece but the size was too big and the piece doesn’t work because the contration of the material.
So I make different pieces with different size.
Tolerence off the material, less 1 mm
Different size
2 Cura
The software
List of machines
First test
And parameters
Second test
With different sizes
3 Ultimaker
Ultimaker 3
Head detail
Treath
First test
Second test
Finish Piece
Test the adaptator on the motor
The adaptator means make the link between the #Tricotin and the #Nema 17.
Good link
On the Tricotin
Between the Nema 17 and the Tricotin
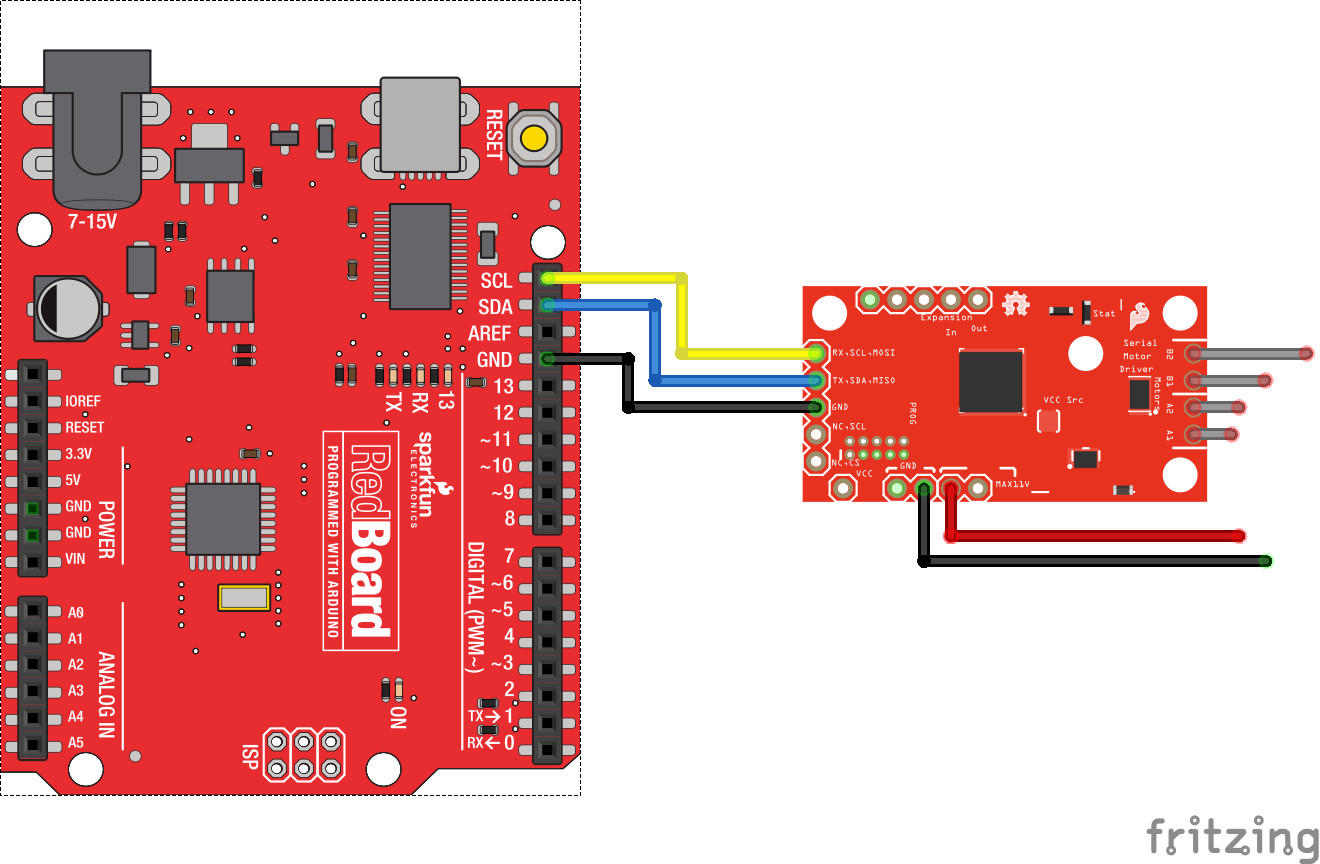
Option A Sparfun Serial Motor Driver
Usefull link
Set up Serial controlled motor sparkfun + arduino
Option B Sparfun Easy Stepper Motor Driver
Usefull link
EasyDriver Stepper Motor sparkfun + arduino
//////////////////////////////////////////////////////////////////
//©2011 bildr
//Released under the MIT License – Please reuse change and share
//Using the easy stepper with your arduino
//use rotate and/or rotateDeg to controll stepper motor
//speed is any number from .01 -> 1 with 1 being fastest –
//Slower Speed == Stronger movement
/////////////////////////////////////////////////////////////////
#define DIR_PIN 2
#define STEP_PIN 3
void setup() {
pinMode(DIR_PIN, OUTPUT);
pinMode(STEP_PIN, OUTPUT);
}
void loop(){
//rotate a specific number of degrees
rotateDeg(360, 1);
delay(1000);
rotateDeg(-360, .1); //reverse
delay(1000);
//rotate a specific number of microsteps (8 microsteps per step)
//a 200 step stepper would take 1600 micro steps for one full revolution
rotate(1600, .5);
delay(1000);
rotate(-1600, .25); //reverse
delay(1000);
}
void rotate(int steps, float speed){
//rotate a specific number of microsteps (8 microsteps per step) – (negitive for reverse movement)
//speed is any number from .01 -> 1 with 1 being fastest – Slower is stronger
int dir = (steps > 0)? HIGH:LOW;
steps = abs(steps);
digitalWrite(DIR_PIN,dir);
float usDelay = (1/speed) * 70;
for(int i=0; i < steps; i++){ digitalWrite(STEP_PIN, HIGH); delayMicroseconds(usDelay); digitalWrite(STEP_PIN, LOW); delayMicroseconds(usDelay); } } void rotateDeg(float deg, float speed){ //rotate a specific number of degrees (negitive for reverse movement) //speed is any number from .01 -> 1 with 1 being fastest – Slower is stronger
int dir = (deg > 0)? HIGH:LOW;
digitalWrite(DIR_PIN,dir);
int steps = abs(deg)*(1/0.225);
float usDelay = (1/speed) * 70;
for(int i=0; i < steps; i++){ digitalWrite(STEP_PIN, HIGH); delayMicroseconds(usDelay); digitalWrite(STEP_PIN, LOW); delayMicroseconds(usDelay); } }```
VIDEO
Packaging
To finish the plug-in I make a #boxe for the motor and the board
With this package I would like to make with this #system an autonomus system for almost every things which work with gears.
The motor need to be at 43mm
the boxe
Carrefour du numerique
Box Design
Opened with Rhino
Opened with Autocad
Laser Cut
Assembly
Next Step Opened Tricotin
For this product I would like to Re-modelize the 3D model for the 3D printing and put it online for sharing with other.
3D Modeling
3D Printing
The base of the Tricotin 3D modeling
3D printing
This is a part of my after final project, that I would like to develop after fabricademy.
Tools with open sources files to downolad
Collaborative Machine
At the Fab I meet Remy Ducros , a Fabulous fabacademy student.
We will colaborate together to make our own fab tricotin machine in a case.
A Fabtricotin mobile machine.
Which can make treadh automatically with motors.
The machine could be with a parametric design and with differents size of tricotin.
At the begining we have started with our : 4 needles but our goal is with 40 needles.
My fabricademy is still finish, but I stay 2 weeks more to finish this project !
Detail from the tricotin
Fusion making add in
DC motor
adaptator V.2
Adaptator V.2 for a DC motor
This photo bellow are a part from the Remy’s documentation .
Tricotin machine Fab
Tricotin machine Fab
I can’t wait !!!

















































{kind=link}

{kind=link}




















