Final project development

Final presentation
Final presentation transcript
For the past three months I’ve been working I’ve been working on the project called Unflakeables. to be honest in the beginning of this second part of Fabricademy, I was fairly lost in choosing a direction to take and what to work on and making decisions, how the scope of my project should be, and what to focus on. So, my head was more or less like this tubings that will be very relevant to the project later. All I knew that I didn’t want to make a product or a solution to any work issues. I was not interested in looking for something for a customer or for a business that least not yet. Uh I wanted to do something for myself, my future post fabric academy itself. Uh that I could later develop and do projects and research on. And as well to anyone else who may benefit from my findings. I hope there will be some people who may find it useful in their own. Uh work so.
I have a background in visual communication and I started in the two-dimensional world. But it was never enough for me, so I moved into two dimensional world and then I found out that also wasn’t enough for me, and I got interested in interaction and everything shape shifting and morphing over time. So what I wanted to work on was movements and during Fabricademy I found out about movement actuators for wearables and that was something I wanted to focus on. So I found out a lot of possible technologies that I could use. In the end I used only one out of all of this. But I’m fairly happy I limited myself to this one because it turned out to be the most interesting one. For me. and
soft robotics contrary to the traditional mechanical robotics. Uh have different advantages. Because a result it the interaction can be very soft and the pressure can be graded very ah smoothly. And I took inspiration from nature as well. This is like one of the first movies ever made. Very famous by Edward Mybridge. This top motion overrunning horse. And on the others end of Spectrum we have this. Ah of the other end of timeline. We have those robotic dogs that are actual motion captures from real dogs. thanks thanks to that I took a closer look into mother nature inventions over the evolution time. And nature came up with very ingenious mechanical ways. Uh I took a look into that but I had to limit myself once again. So I choose only three. To work on in the inflatables. I chose those three because they were like the easiest of playing I think. and when it comes to the processes I tried many processes of making inflatables. One of, this is the sample of trial of laser welding with an unfocused laser cutter. It was absolutely failed. So, I worked on three other ones.
Uh the heat transfer vinyl method which we learned on the Fabricademy, silicon casting that we also were learning and in my research, I found papers, two papers from MIT media lab with completely different method of making inflatables. Which is heat fusing with three different directs to her. Uh because it the printer was not the most reliable. I had to change the method a little bit and adjust for the uneven belts of the printer that I had available. So I used the baking paper on top of it. Thermo plastic sheets underneath and to make up for the unevenness of the printer but I used the neoprene fabric which applied even pressure. And the heat From the printer extruder without any filament is enough to to seal the thermoplastics to create inflatable in a very computer I did precise methods anyway.
And yes this is a bigger subject. Nothing very interesting but the results will be much more interesting. I had very many trials because that was not the very established method. So a lot of trials later with the settings and technique. And a lot of geometries that I tried to create different kinds of motion as I was inspired by the nature. I also had a lot and lot of trials.
And based on that, I also tried different materials which you can see here, lamination pouches, PBA film and LDPA bags and they all have different properties and require different settings. And I obtained three different movements that you will later see in the final video. When it comes to electronics, I want to as I intended a wearable use for my project, I wanted to use a microblower which is like two, two, two centimeters tiny Uh electric motor but it at this moment it doesn’t work so it works with regular aircon. And I had the custom made PCB with an 80 tiny problem microcontroller. So And during the presentations I met Ricardo Nasimiento who is doing his pieces on a haptic feedback. And since he’s seen my project then he mentioned that I could as well use the inflatables for haptic feedback and this can even it doesn’t exclude the visual aspect of it. So I explored also that way. because there are ways to to steer the motion, the way it in place. Depending on which side you place on your body, the rigid of the flexible layer, the inflation can happen outwards into the world to see or inwards onto your body so you can feel it and have a sensation of it. Sorry, sorry, I have this. Sorry Sorry for the ideas. So in the end my project turning 10 explanation inflatables as visually haptic actuators. And the haptic part was introduced later so I’m working on this right now and I’m very happy I discovered this in the sometime during this research. And haptic feedback is very interesting and and very underdeveloped under a bit a bit overlooked thing. In the wearable as far as I see now. Because we mainly see the vibration motors and our skin is capable of feeling much more than just a vibration. And this is something I wanted to explore. you can see in the video. Just to mention those are some directions I discovered during working that I would like to pursue later. Of course, thank you to everyone involved and the last minute sums up. I think it’s all from me now. I’m curious about your feedback.
Final presentation feedback transcript
Um I can go first. Thank you. Thank you so much Saskia for your for your work and for your presentation. It’s it’s really really really interesting. Um and it’s great to see sort of what I would call some foundational research going on. Like you’re really looking at this is a material this is a a basic kind of fundamental of a behaviour that you’re looking for and how do we do that? How do we control it? and and yeah it’s really really fantastic to see. Um I really like that you had so inflation obviously bend and twist and I think your examples that demonstrate those emotions are are extremely convincing. Um and it was it’s also really interesting to see the 3 D printing method to weld these layers together seems really effective which is great. and accessible you know like you don’t need to be able to have to threeD print you know different pliability of materials to get you know these things happening. I would be really interested to see you combining some of these movements in one. Like layering these things and then getting really complex movements from the same the same process. You know and being able to have something if you ah activate one that does this and then another one that’s got another layer and it folds down. You make you know a no could you could probably make something that moves like walks. there’s no reason why not. I also really liked the different material exploration that you did and maybe that could be explored further particularly in combination with layering these different sort of actuation methods different movements that they that they have.
Um yeah super interesting. Really great. Love it. Thank you. Thank you. Yeah, totally agree. I really like the work you did. I don’t know why you talk a little bit sad about it because you actually did some amazing work. You should be happy about it, honestly. I think this kind of fundamental work that we definitely need and to be honest, back in the day when I was starting with the reframe project, we actually looked into a lot of different activation methods. I always said, I never going to work with light. Eventually, I did, but there was not my first choice. And the reason why we looked into other ways of activating, and eventually didn’t show us that back then, was because what we often don’t see when we talk about wearables, is that to actually create the pressure and you probably know this from your own experience now to create the pressure to be able to make a reaction like that. You need a bigger kind of component. And what I would like you to know is that there is this Gaiat MIT doing this amazing research on this flow IO system. Um that is really compact and really tiny and actually really accessible to use as a designer. So maybe it would be interesting as a next step to explore that and these kind of collaborations where you can actually make it beyond an interesting shape that moves but also what happens when you combine this with a moving body. What happens then and how can you go beyond indeed giving a feedback but also create new kinds of shapes or silhouettes for example with that. Yeah, I’ll just throw in there really great exploration, Saskia. Uh you stumbled into my research field with just shape-changing objects and spaces and and you need to go look at a paper called Morpheus Plus and the work of Bruno Govilla just because there is a language that is used to describe some of this and it’ll help you find even more cool things to do with what you’ve got going on there. So, I I think you’re you’re on a really good track and I love how you modify that technique for plastic melting from MIT to work on your 3D printer. Uh know that there’s a way to take a tiny Ballhead and actually change out your 3D printing head. It’ll make your life just a little bit easier. I’ve done a little bit of metal plastic melting with that. And it’s it’s a really good way to use your 3D printer. So, way to mod the machines. Always love to see a machine prosthetic. Thank you. Congratulations. Congratulations Asia. I would love to see this research go forward because it has been rigorous and very meticulous. So I think it’s it’s worth like now that you’ve created your alphabet that you can make your words. Yeah. I would be happy to. Very, very, yeah, really rigorous. Good documentation, logical, you know, process, really solid work. Fantastic. Thank you.
Yeah and maybe also it would be super interesting to explore later on and the next step maybe. How could you combine this with other materials? How do they interact with each other? How could you, for example, enlarge your movements by combining it with another material. So, besides the material in itself, also the combination of that with the body or a textile for example, it would be really interesting to explore. Yeah, it’s a really good fundamental you have right now that you can work from. Yeah. It’s a really interesting masters project that just graduated at at that I I saw his graduation and and I work with him now in in in my research group. And Jose did a pneumatic actuators and they were it’s like a kit connected that you can connect to textiles to make the textile sort of move almost like it’s an animal or like it’s alive. Um and and he had a lot of trouble 3D printing these hinges. Um and and that was kind of like his focus. But there’s there’s just so many interesting things where you kind of think about how what context can these be used in. Um how can we develop them for the body or architecture or or furniture like got anything and and the fact that you’ve done sort of fundamental research means that there’s so many different potential places that this can go. So I I would really encourage you to continue. Now it’s getting exciting like more like more freedom to build on it and. yes. excited to do it right now. Do you have a research background? Uh not at all. the the end of this project thanks to Anastasia and Ricardo there will be a paper. Yeah. Collaborative so I’m entering. Yeah. You you came across like you’re a researcher. Like you’ve been trained. Wow. That’s Thank you. So it’s time for our bio break because we need a little bit to stretch and to take some water and do the biobreak. Let’s do five minutes break and then let’s continue. Thank you Saskia.
Project proposal presentation
The first project concept
Inspirations and existing projects
Inspirations & references
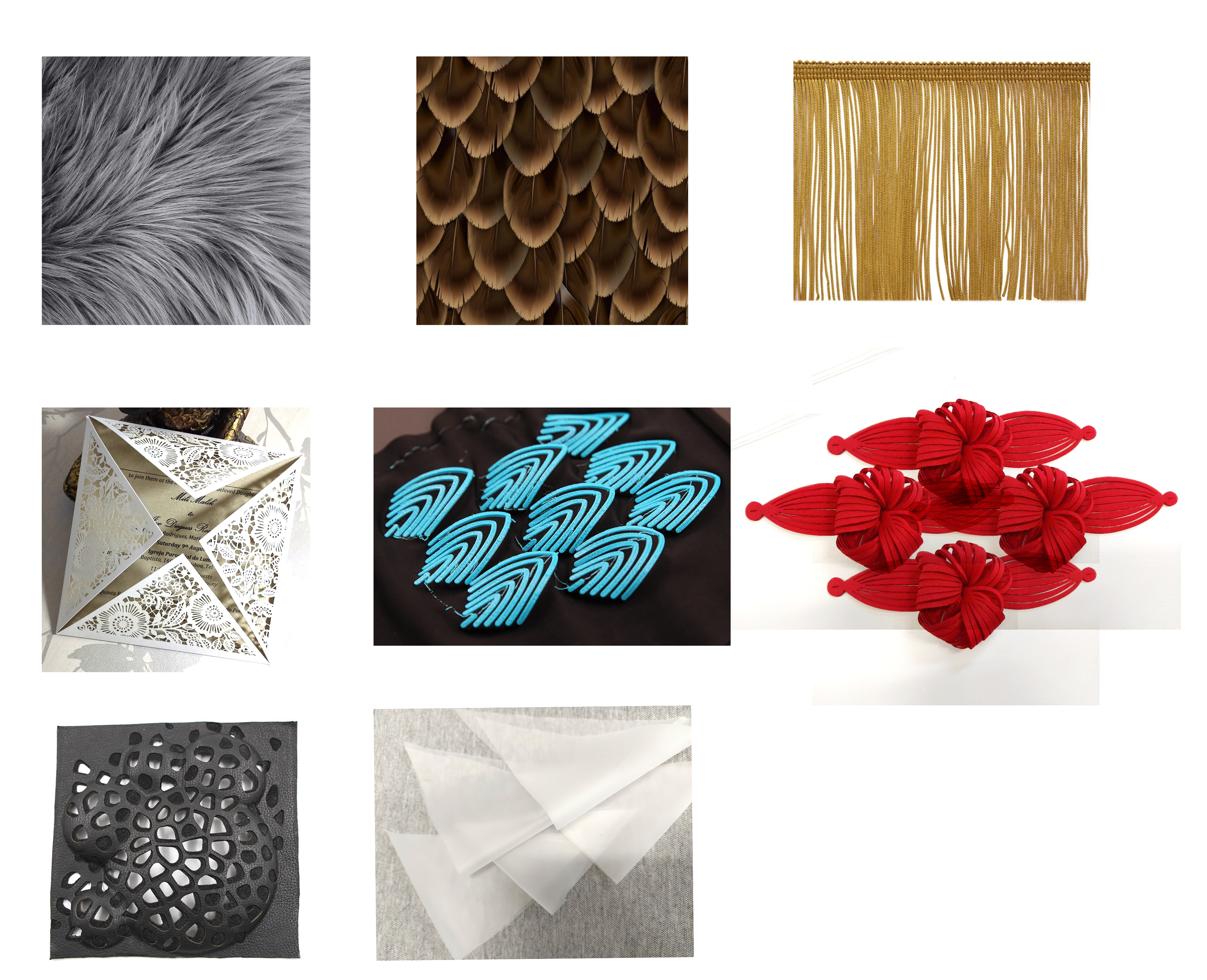
Living textile surfaces
Augmenting the movement effect on fabrics/textiles:
- feathers
- fringes
- 3d prints on fabrics
- lasercut modules
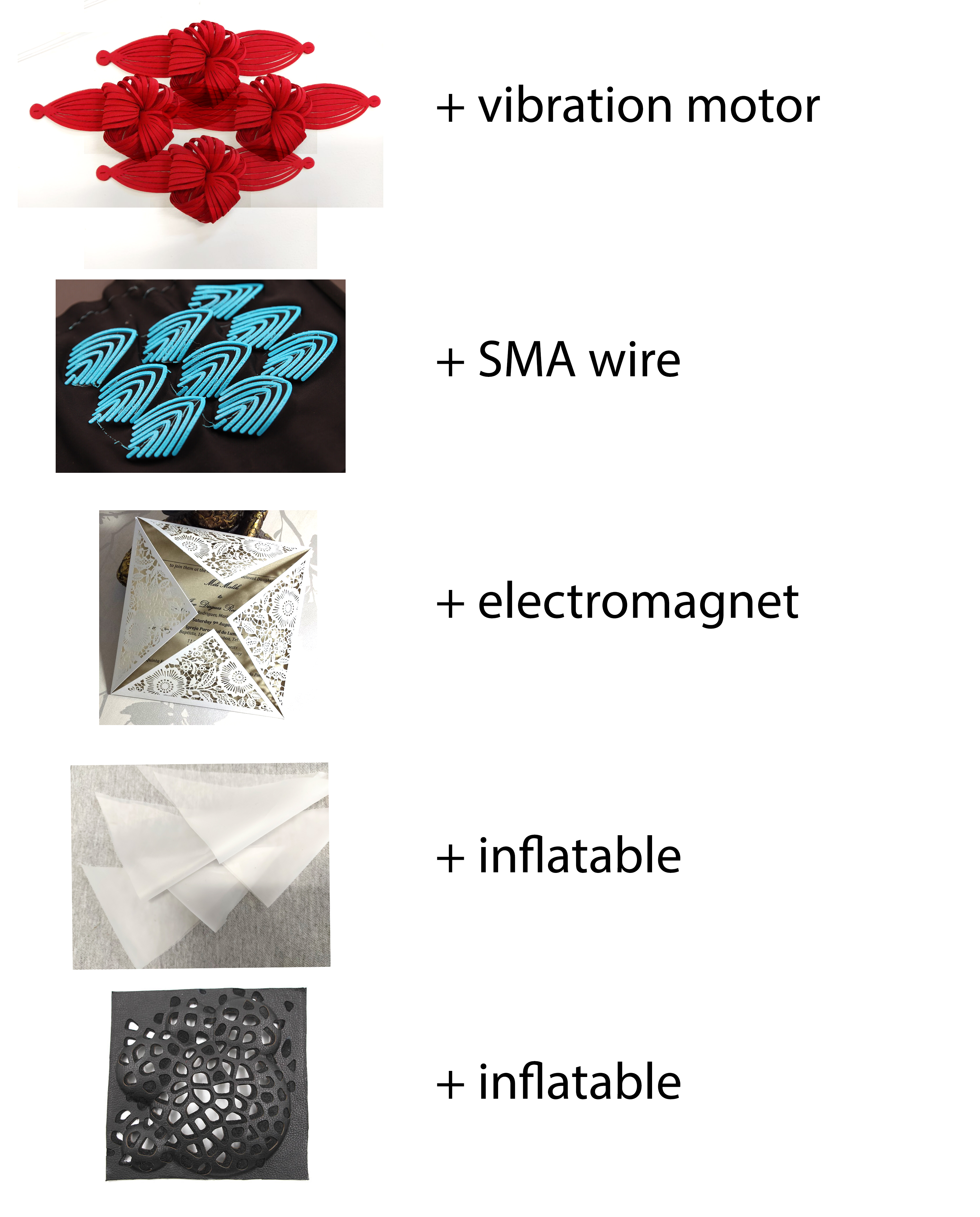
Possible movement generation
- soft robotics/inflatables
- mini vibration motors
- stepper/dc motors
- transducers
- solenoids
- magnetic
- hydroscopic/hydrophillic
- piezo
- artificial muscles
- SMA
- dielectric elastomer actuator
planning
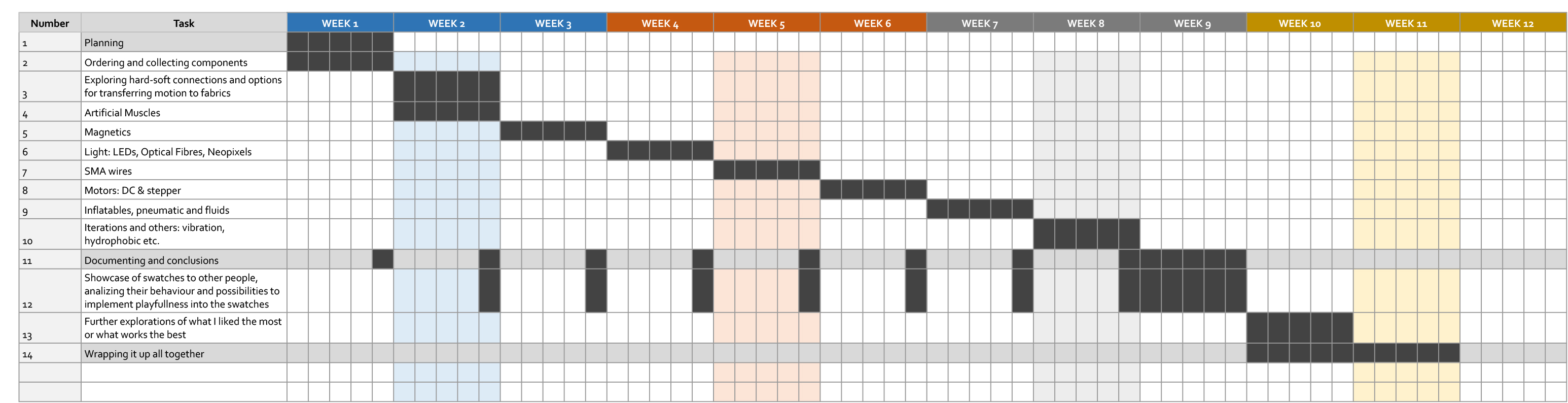
Artificial Muscles
https://www.seas.harvard.edu/news/2017/11/artificial-muscles-give-soft-robots-superpowersMagnets
Light: LEDs, Optical Fibres, Neopixels

SMA wires
https://www.kobakant.at/DIY/?p=7981Afroditi Psarra and Dafni Papadopoulou - The Culture Dress from WeMake on Vimeo.
Motors: DC & stepper
Inflatables, pneumatic and fluids
Iterations and others: vibration, hydrophobic etc.
Development of small-sized flexible pneumatic valve using vibration motor and its application for wearable actuator Authors: Tetsuya Akagi, Shujiro Dohta, Shinichi Katayamahttps://www.inderscience.com/info/inarticle.php?artid=34735
Back