Soft robotic¶
 This week is all about the very specific field of soft robotics. Unlike rigid robots we are mostly used to, soft bodied robots have similarities and performance characteristics similar to living organisms or the human body. Soft-robotics are based in Bio-inspired design or biomimicry and have applications in wearables, rehabilitation prosthetics, surgical robots, rescuing and others. We will focus on the fabrication of soft actuators, sensors and grippers using novel materials, artificial muscles and performative locomotion design.
This week is all about the very specific field of soft robotics. Unlike rigid robots we are mostly used to, soft bodied robots have similarities and performance characteristics similar to living organisms or the human body. Soft-robotics are based in Bio-inspired design or biomimicry and have applications in wearables, rehabilitation prosthetics, surgical robots, rescuing and others. We will focus on the fabrication of soft actuators, sensors and grippers using novel materials, artificial muscles and performative locomotion design.
- Document the concept, sketches, references also to artistic and scientific publications
- Learn the fabrication of soft actuators, sensors and grippers using novel materials, artificial muscles and performative locomotion design
- Make a soft robotic sample, develop the pattern for the Inflatable and draw a sketch of the air flow
- Develop a pneumatic wrist brace (basic level) or Develop a Soft Gripper (intermediate level) or Built a Pneumatic, digitally controlled system (advanced level)
- Experiment with different materials, such as silicones, 3d printing, parchment paper, thermoadesive vynil, bioplastic , document your achievements and unexpected outcomes
- Upload a small video of your inflatable working
- EXTRA POINT Integrate it into a project
Reference videos¶
There is a lot of reasons to work on soft robots here are some great explainations of issues :
I love the "robots will be softer and safer conclusion! In this video, where you have some more examples, the conclusion is: robots evolution have only just began
More examples and interviews of people working on soft robotic :
A practical solution :
This is a selection of my favorites videos, after watching all this, I really want to to give it a try. Even if I would love to get an utilitary robot, for the moment I will simply try to make move "something". After watching Adriana Cabera website explainations, I decide to try a bench leaf.
Vinyl inflatable¶
Instructions¶
Adriana Cabera give us some explaination to do an inflatable with vynil
Scketch¶
Even if I would love to get an utilitary robot, for the moment I will simply try to make move "something". After watching Adriana Cabera website explainations, I decide to try: a curve, angles and a spiral, using her direction.

Realization¶
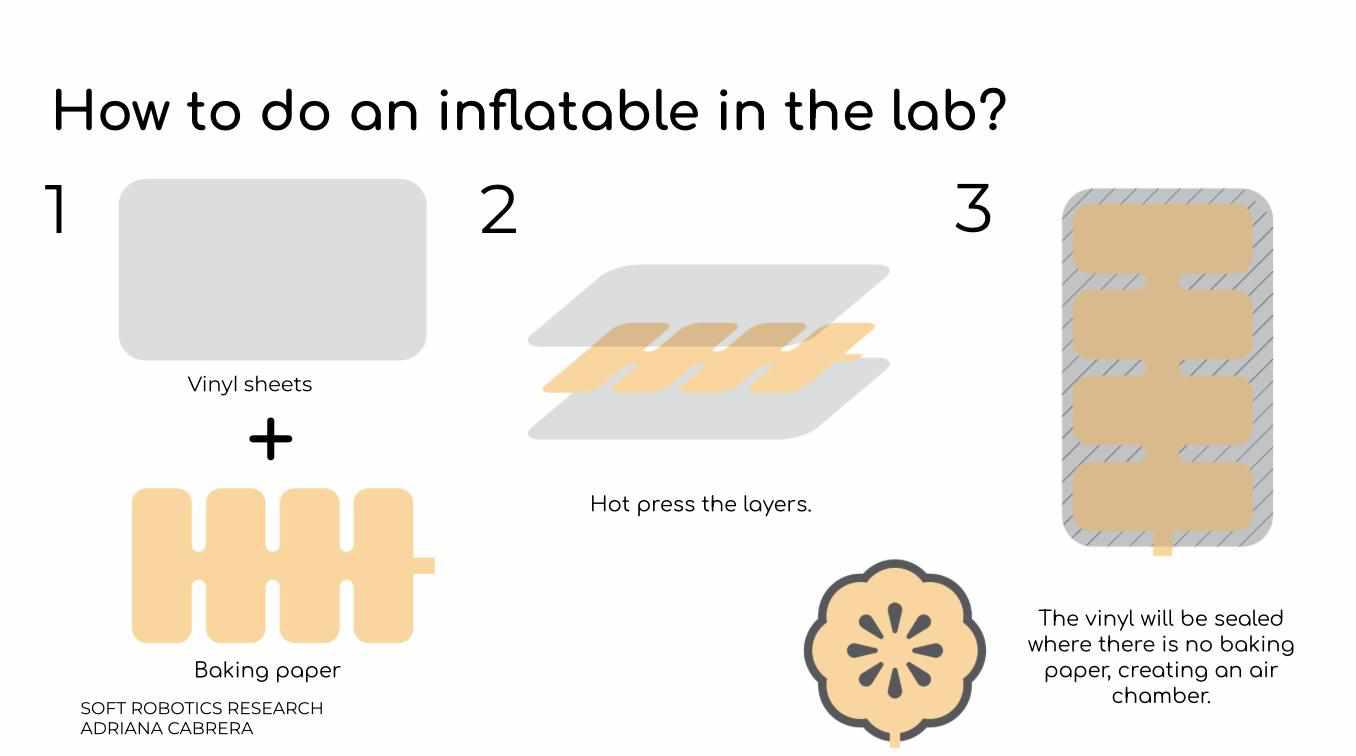
You can find Adriana tutorial as a PDF, here is kind of a summary
* with by hand or with a vectorial drawer ;
* Connect all the air channels ;
* Make sure to add an opening leading to the edge (where you'll insert the pipe) ;
* The air tunnels as well as the glued lines should be at least 5mm wide.
* vinyl sheet
* baking paper
* scissors or digital cuter
* pencil
* straw or tiny tube
* iron or heat-press
* Cut out the insert for your inflatable from a sheet of baking paper (by hand or with a digital cutter) ;
* Put the insert between two sheets of heat-transfer vinyl ;
* Add layers of baking paper between the vinyl and other surfaces ;
* Put the sandwiched inflatable in a heat-press (around 140 C degrees, 15 seconds) or use a regular iron to apply heat;
* Let the inflatable cool down for a few minutes before moving it, so it sticks better ;
* Cut out the excess vinyl around the edges ;
* Insert a pipe in the previously prepared opening.
I draw my my pattern 1 with Inskape.
Results¶
The 2 first are working, the third is a total failed, it was supposed to roll like a snail...
To inflate them with an arduino¶
Thanks to Camille Barot it was quicly test with an arduino 5s blink.

I saw a Bulbasaur!
const int AIR_PIN = 9;
void setup() {
pinMode(AIR_PIN, OUTPUT);
}
void loop() {
digitalWrite(AIR_PIN, HIGH); //turn the pump on
delay(5000); //for 5 seconds
digitalWrite(AIR_PIN, LOW); //turn the pump off
delay(5000); //for 5 seconds
}
The GNAC flower¶
Scketch¶
 the idea is to make a air reserve as big to can fold the fish bones part and close the flower. On the bottom a piece fabric make the petals stronger and help them to fold.
the idea is to make a air reserve as big to can fold the fish bones part and close the flower. On the bottom a piece fabric make the petals stronger and help them to fold.
Design¶
I prepared the moulds with tinkercad2. I planed moulds:
- for the upper piece;
- to make the bottom;
- one to disassembled to facilitate demoulding;
- and one to use with a sringe in case the air reserve was not enought or to use it as a gripper by turning it upside down.
Print failed¶
After 2 failed prints, I give up the GNAC flower.

The FlowIO platform¶
If you want to go deeper in soft robotics the [FlowIO platform looks to be a must have.
My week review for instagram¶
Fabrication files¶
-
Editable tinkercad mold (you can also download the STL from there) ↩