Week 11-29/11/2022
Dic 6, 2022
Soft robotics is a field of robotics that deals with the design and construction of robots whose bodies are primarily composed of soft materials. This allows for a greater range of motion and flexibility than is possible with traditional rigid robotics, making soft robots ideal for certain tasks such as handling fragile objects or working in close proximity to humans.
1.Research
2.Making a soft robot
3. Reflections
4. Files
5. References:
Soft robotics is a field of robotics that deals with the design and construction of robots whose bodies are primarily composed of soft materials. This allows for a greater range of motion and flexibility than is possible with traditional rigid robotics, making soft robots ideal for certain tasks such as handling fragile objects or working in close proximity to humans.
Here are few examples I found about this particular field:

One popular type of soft robot is the gripper. Grippers are one of the most basic, yet essential components of a robotic system. They allow a robot to interact with and manipulate its surroundings. There are many different types of grippers, each with their own advantages and disadvantages. For example, pneumatic grippers are common in industrial applications because they can generate a large amount of force. However, they are also bulky and require a complex pneumatic system. Electric grippers are smaller and more lightweight, but they are generally not as strong as pneumatic grippers.
The design of a soft robotic gripper is relatively simple: a gripper body is mounted on a robotic arm, and the gripper itself is made up of a series of fingers or pads that can open and close to grasp an object.
Although it looks simple, designing and building a soft robotic gripper that is both effective and durable is not a trivial task. In this assignment, I will try to cover the process of designing and building a soft robotic gripper using different techniques and materials , including the considerations that need to be made in order to achieve an effective and durable design.
I started exploring using heat transfer vynil. I cut some pieces an using a hair iron I paste them together.

After trying for some time I realize using this material was kinda complicated, so I decide to take a look at other materials and technologies.
This second exploration was build using 3D Printing TPU and wires.
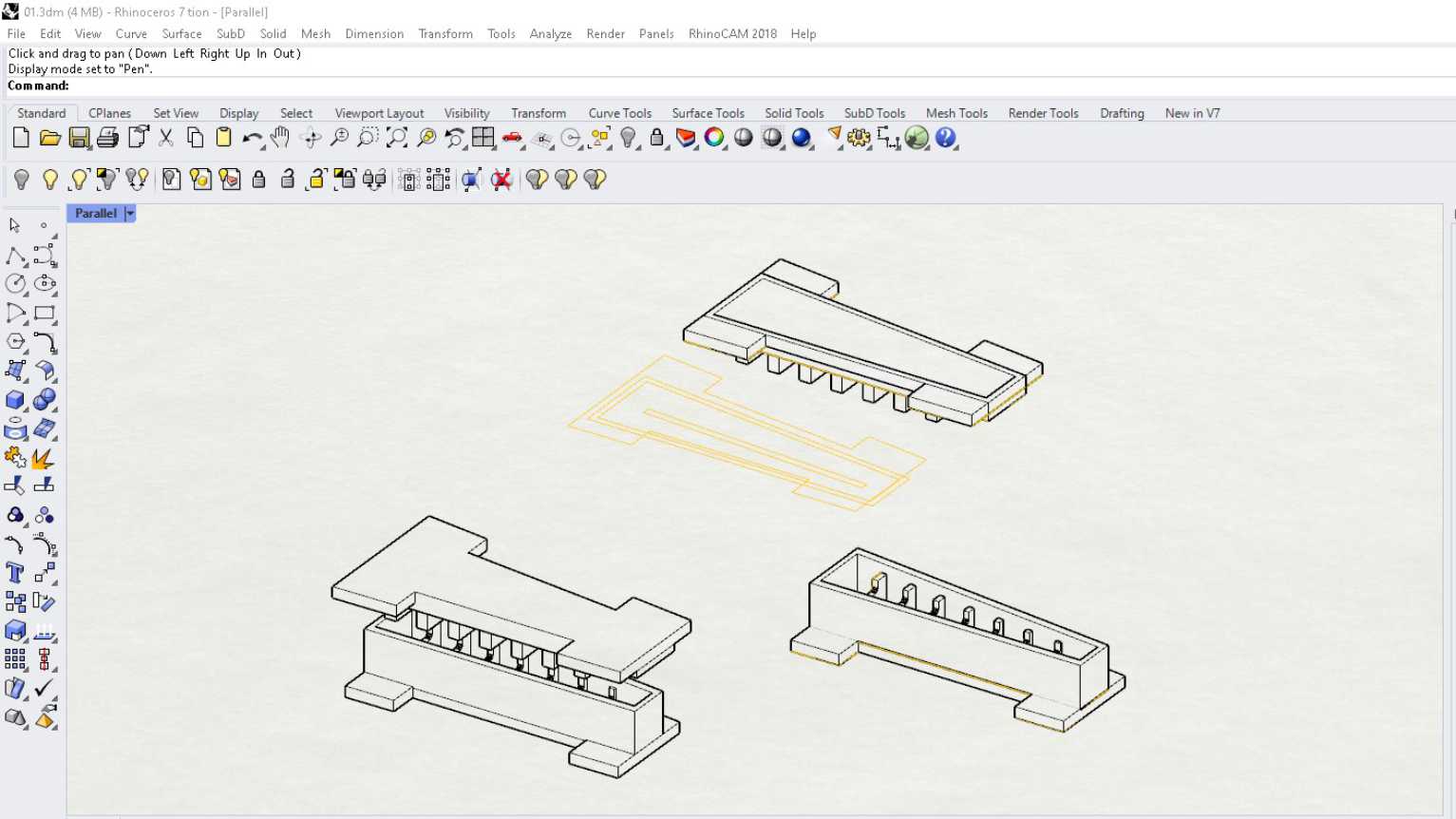
I begin by creating a 3D model for a gripper using Rhinoceros Software.
I 3D print the piece using a Flashforge dremer machine an TPU.

I print the rest of the gripper and test it. This gripper can be used to pick up and manipulate small objects. Here's my result.

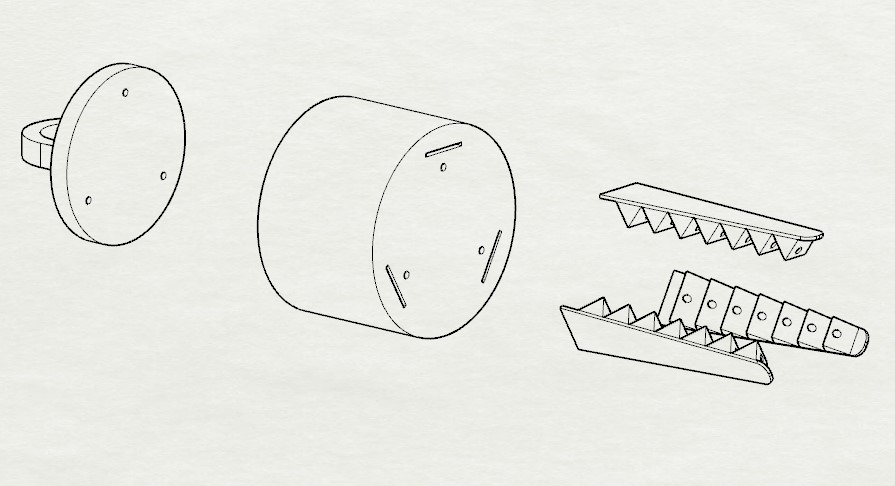
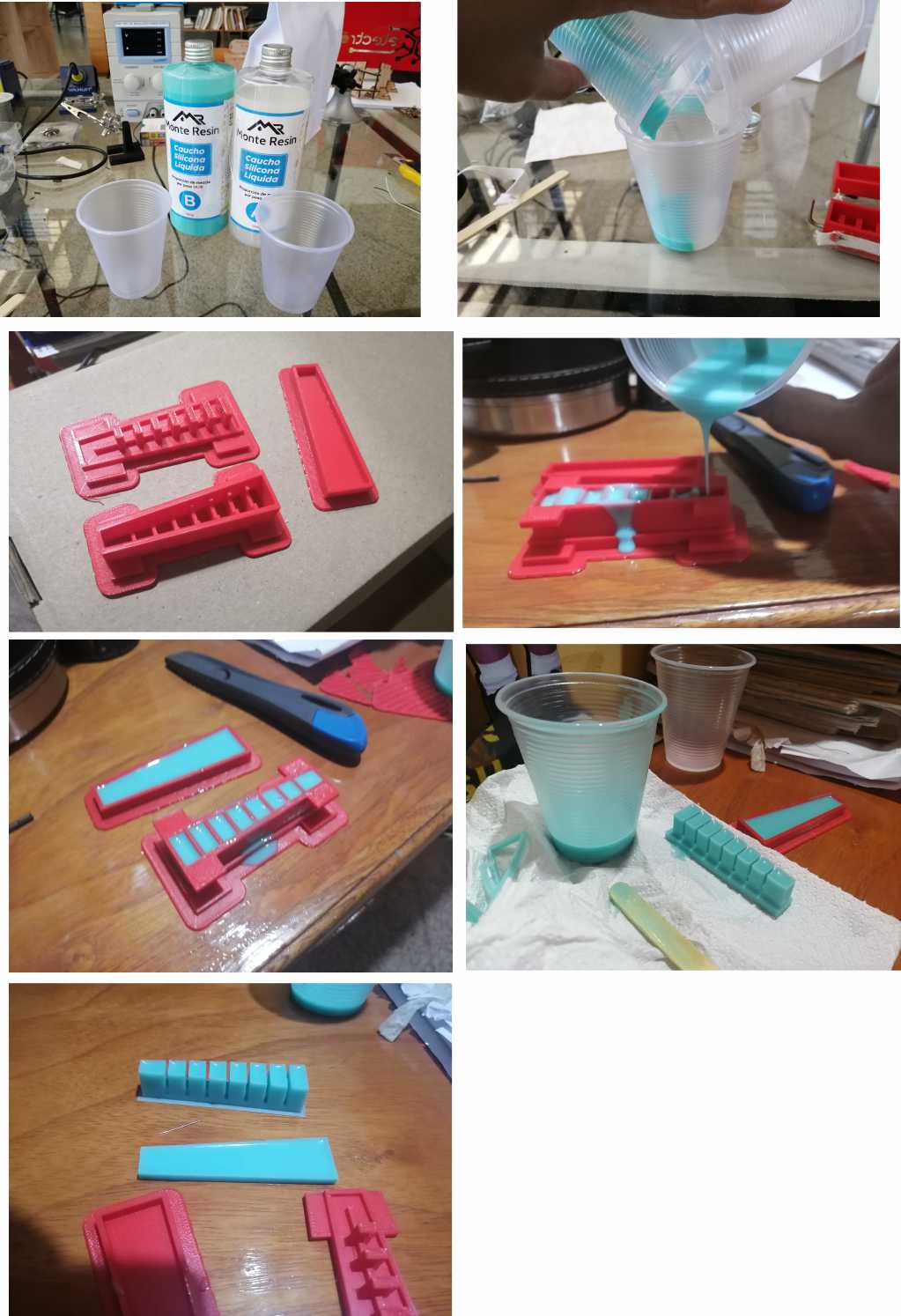
This gripper was build using silicone rubber and an air pump, I used these materials:
I started testing one arm, it kinda worked but not all the segments were bending:
Test Silicone robot arm de Silvia Lugo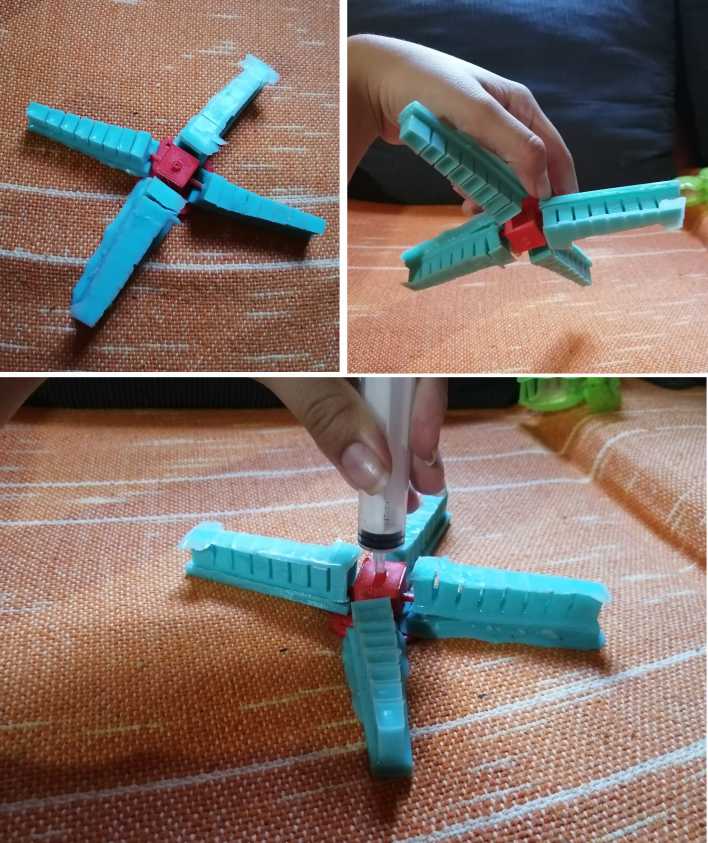
Although the arms came off right, the prototype didn't work. The arms had leaks and air in some parts
After building several gripper I found out few key considerations that need to be taken into account:
The material of the gripper body is one of the most important considerations in the design of a soft robotic gripper. The material must be soft enough to allow the gripper to conform to the shape of the object being grasped, yet stiff enough to maintain its shape during the grasping process. In addition, the material must be strong enough to withstand the forces exerted by the gripper during operation. There are many different types of materials that can be used for this purpose, including elastomers, polymers, and hydrogels. Another important consideration is the thickness of the material. The thickness will affect the ability of the gripper to grip different sizes and shapes of objects.
The geometry of the gripper fingers is another important consideration. The fingers must be designed such that they can wrap around the object to be grasped. The size and shape of the gripper should be designed to fit the object being gripped. The gripper should be able to conform to the object's shape and size while still providing sufficient gripping force.
Soft robot gripper actuators can use a variety of mechanisms to generate motion, such as pneumatic, hydraulic, or electric. The mechanism will depend on the application and the requirements for force, speed, and precision.
The gripper should be designed with safety in mind, especially if it will be used in human-robot interaction. The gripper should be able to grip objects without damaging them, and should not pose a risk of injury to humans.
The gripper should be designed to withstand repeated use and wear and tear. The material should be chosen to resist fatigue and abrasion, and the design should minimize stress concentrations.
The gripper should be designed with safety in mind, especially if it will be used in human-robot interaction. The gripper should be able to grip objects without damaging them, and should not pose a risk of injury to humans.
An actuator is a component of a soft robot gripper that is responsible for generating motion or force. The actuator can be powered by a variety of mechanisms, such as pneumatic, hydraulic, or electric. Pneumatic and hydraulic actuators use pressurized air or fluid to generate motion, while electric actuators use electrical energy to generate motion.
Depending on the design, the actuator may be used to grip an object, release an object, or adjust the shape of the gripper to fit the object being gripped. The choice of actuator will depend on the specific application and the requirements for force, speed, and precision. Some common types of actuators used in soft robot grippers include shape memory alloys, pneumatic artificial muscles, and dielectric elastomers.
Overall, designing a soft robot arm requires careful consideration of a range of factors, and it is important to consider and talk with experts to ensure the arm meets all of the necessary requirements.
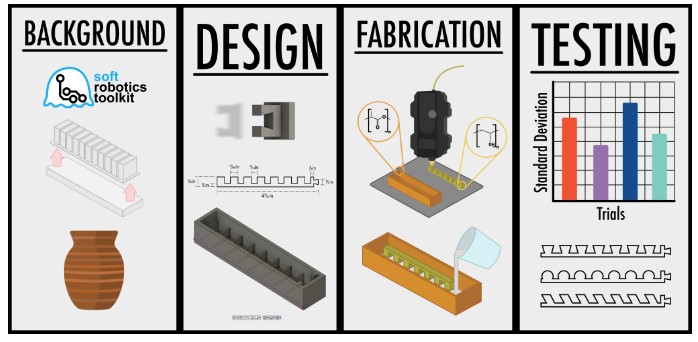
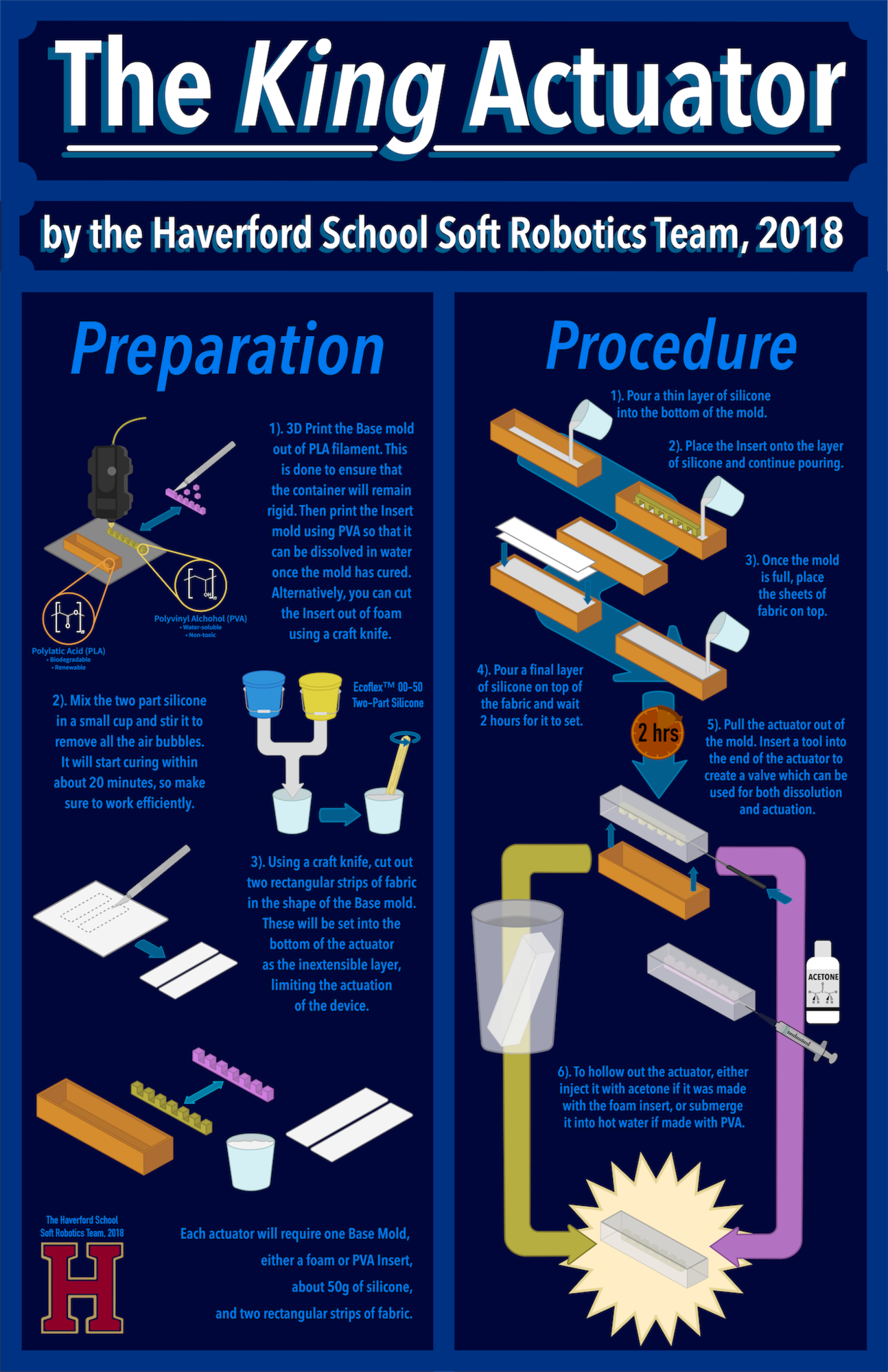
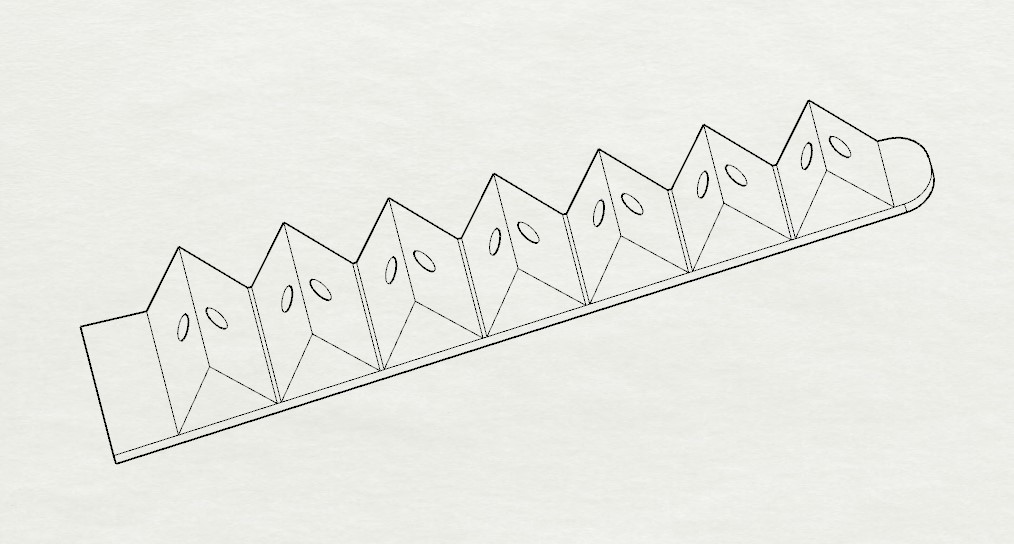
Soft Gripper Fabrication Guide
SoftGripping- The Modular Design System For Flexible Gripping