Soft Robotic Plant¶
Concept¶

The Soft Robotic Plant is an artificial organism that breathes. It is a pneumatic body that expands and contracts in response to environmental data (soil moisture from a real plant) and bioelectrical signals captured from living organisms, including plant electrical activity and human heartbeat. The system translates invisible inputs into visible movement. Air pressure becomes the mechanism through which data is embodied.
Rather than simulating a flower, the structure performs a mechanical interpretation of vitality.
System Components¶

The Soft Robotic Plant/Artificial Plant is composed of four main fabricated elements:
-
Pneumatic Body Muscles pneumatic silicone actuators Silicone air chambers that inflate and deflate, producing the breathing movement of the artificial flower.
-
Petals fabric reinforced silicone petals Flexible silicone petals reinforced with fabric to guide deformation and create controlled opening and closing.
-
Pistil central structural element A central structural element that visually and mechanically organizes the flower morphology.
-
Base / Calyx structural support + cable channels A 3D printed structure that supports the pneumatic body while concealing air tubes and electrical wiring.
Soft Robotic Flower Morphological Inspiration¶
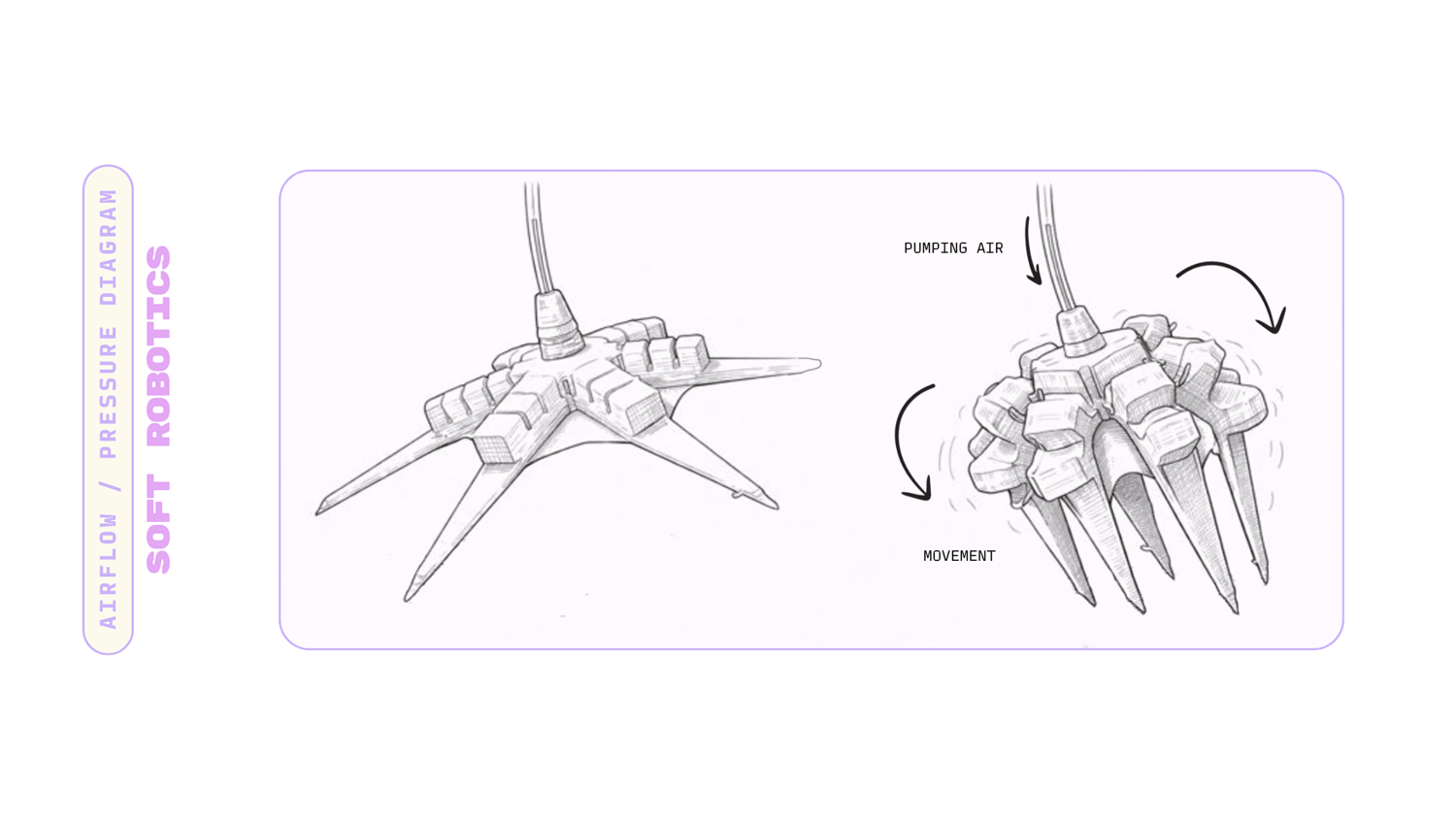
The formal inspiration derives from jellyfish soft robotics, whose radial actuation and fluid deformation translate effectively into a floral morphology.
Like jellyfish robots, the structure relies on distributed air chambers to generate movement. Inflation creates expansion; deflation produces contraction. The resulting motion is smooth, organic, and continuous.
This adaptive softness allows the artificial flower to appear alive while remaining visibly technological.
Source: Yirmibesoglu, Osman & Oshiro, Tyler & Olson, Gina & Palmer, Camille & Mengüç, Yigit. (2019). Evaluation of 3D Printed Soft Robots in Radiation Environments and Comparison With Molded Counterparts. Frontiers in Robotics and AI. 6. 10.3389/frobt.2019.00040
Soft Robotic Flower Material¶
 The soft body is cast in transparent liquid silicone rubber:
The soft body is cast in transparent liquid silicone rubber:
R PRO GLASS – Crystal-Clear Liquid Silicone Rubber Reschimica
The material was selected for:
- Flexibility and elasticity
- Transparency (to reveal air deformation)
- Structural resistance under repeated inflation cycles
Base / Calyx¶
 Study for the base.
Study for the base.
The soft flower is supported by a rigid 3D printed calyx and stem, which connect the actuator to the installation base. This element provides mechanical support while also integrating the passage of pneumatic tubes and wiring.
The initial geometry was adapted from an existing 3D model from makerworld from and extensively modified to fit the needs of the project. Decorative elements were removed, internal routing channels were added, and the base was redesigned to support the custom soft actuator.
Through these modifications, the calyx evolved from a decorative object into a functional structural interface between the flower, the sensors and the control system.
Calix Material¶
 The rigid components were fabricated in translucent PLA,
a bio-based thermoplastic derived from renewable resources, selected for its balance between structural stability, light diffusion, and organic visual quality.
The rigid components were fabricated in translucent PLA,
a bio-based thermoplastic derived from renewable resources, selected for its balance between structural stability, light diffusion, and organic visual quality.
The material was chosen for:
- Lightness and ease of fabrication
- Sufficient rigidity for structural parts
- Translucent quality, allowing light to pass through softly
- Compatibility with rapid prototyping and iterative 3D printing
ELEGOO PLA Filament 1.75 1kg Translucent, ELEGOO
Process¶
Soft Robotic Flower/Artificial Plant¶
Mold design¶
The mold used to fabricate the actuators was designed using Fusion 360 in collaboration with Carlos Roque from Biolab, allowing precise control over both the internal pneumatic cavities and the external geometry of the actuator. During development, the mould underwent several iterations. The first version created in Soft Robotics assignment generated pneumatic muscles with a relatively square geometry and uniform height across the entire structure. While these prototypes successfully produced inflation, the resulting aestethic appeared more mechanical then organic. Subsequent iterations introduced a more complex geometry with variations in height and curvature along different axes. These changes allowed the expansion of the silicone to distribute more gradually through the structure, resulting in smoother deformation and more fluid motion. The mould itself also evolved structurally during the development process. Early versions required the use of elastic bands to maintain alignment between mould parts during casting. The mould was redesigned into a four-part modular structure that allows the pieces to interlock and align precisely without external constraints. This configuration simplified the casting process and improved the reliability of the fabrication workflow.
The petals were developed through an iterative mould-design process aimed at improving both movement quality and organic appearance.
The development evolved through three main stages: an initial stem structure, a second version with a basic petal geometry, and a later version with textured petals and an integrated center connection. These iterations helped transform the actuator from a simpler technical prototype into a more articulated and biomimetic element.
To improve performance, the silicone structure was reinforced with a fabric scaffold layer, which helped control deformation during inflation and made the petal movement more stable and directional.



 Mold Version nº5 and nº6, Carlotta Premazzi Fabricademy 2026
Mold Version nº5 and nº6, Carlotta Premazzi Fabricademy 2026
Silicone casting¶
The pneumatic actuator was fabricated through silicone casting with textile reinforcement. The workflow combines digital modelling, 3D printed moulds and multi-step casting to produce airtight soft chambers capable of repeated inflation.
The mould was designed in Fusion 360 and 3D printed in PLA. Several iterations were necessary: early versions generated more rigid and mechanical deformations, while later refinements introduced smoother curves and variable heights to achieve softer movement.
The actuator was produced through a two-stage casting process. First, the layer containing the pneumatic cavities was cast. Then, a second layer sealed the chambers while embedding a textile scaffold, which acts as a constraint layer and helps guide the deformation during inflation.
The process involved recurring challenges, especially air bubbles, venting issues and occasional blockage of pneumatic channels during sealing. These tests were essential in refining both the mould and the casting workflow.
Air chamber testing¶
3D print¶
The rigid elements of the flower were fabricated through 3D printing in Transparent PLA (ELEGOO Filament PLA 1.75) with Biolab Bambu Lab H2D | Dual Extruder 3D Printer. This material was selected for its precision, lightness, and visual compatibility with the artificial and luminous character of the piece. PLA was also considered appropriate in the context of the project because it is a bio-based thermoplastic, commonly derived from renewable resources such as corn starch or sugarcane. Within this system, the printed parts act as structural supports and housings for tubes, wires, and LEDs, mediating between the soft body of the flower and technical components.
Base¶
 The 3D geometry was derived from a makerworld model and subsequently reworked for the needs of this project. The original flower structure was removed, and a new detachable base composed of two interlocking parts was designed. This modification enabled the incorporation of internal channels for tubes, wires, and LEDs, improving both assembly and technical integration while preserving the overall organic aesthetic.
The fabrication process required several iterations. The first two print attempts failed because the part slipped during printing, leading to a redesign of the base with reinforced areas and adjusted infill settings. The final version was successfully printed over approximately 18 hours, using around 370 g of material.
The 3D geometry was derived from a makerworld model and subsequently reworked for the needs of this project. The original flower structure was removed, and a new detachable base composed of two interlocking parts was designed. This modification enabled the incorporation of internal channels for tubes, wires, and LEDs, improving both assembly and technical integration while preserving the overall organic aesthetic.
The fabrication process required several iterations. The first two print attempts failed because the part slipped during printing, leading to a redesign of the base with reinforced areas and adjusted infill settings. The final version was successfully printed over approximately 18 hours, using around 370 g of material.
Pistil¶
The pistil geometry was adapted from an existing MakerWorld model, used as a starting reference and reworked for the specific needs of this project. The original flower structure was removed, preserving only the central pistil element.
A new base was then designed to connect the pistil with the petals through an interlocking system. This custom modification allowed the central part to be structurally integrated into the flower while also accommodating the internal passage of tubes

3d print process on Bambu LAb H25.
Carlotta Premazzi Fabricademy 2026, with Carlos Roque, Biolab Lisbon