Water and magnets#
soft robotics

I. About#
My personal belief is that the next research paradigm in soft robotics will be related to material properties. In order to mimic nature successfully our materials have to evolve. During the lecture by [] I was inspired by thinking of water as an actuator. I also did some work with ferrofluid previously and thought to incorporate the compound into a stretchy material since I haven’t seen that before.
II. Passive gripper#
Materials#
- Bioplastics (agar and gelatin based)
- Stockings
- Hydrogel beads
Process#
The general structure of a gripper is an expandable (usually by air) chamber paired with an non-expandable lining. Thus when filling the chambers with air the structure deforms by bending in a circular formation. To mimic this structure with alternate materials, I tried pairing hydrogels as the expanding element with different kinds of plastics (non-expandable lining), including bioplastics.
Starting with the cookbook recipes I followed the instructions for a basic bioplastic film as well as a bioplastic that’s between the flexible one and the harder film. Using a laser cut mold, the dimensions of which are based on the size of the expanded hydrogel beads.
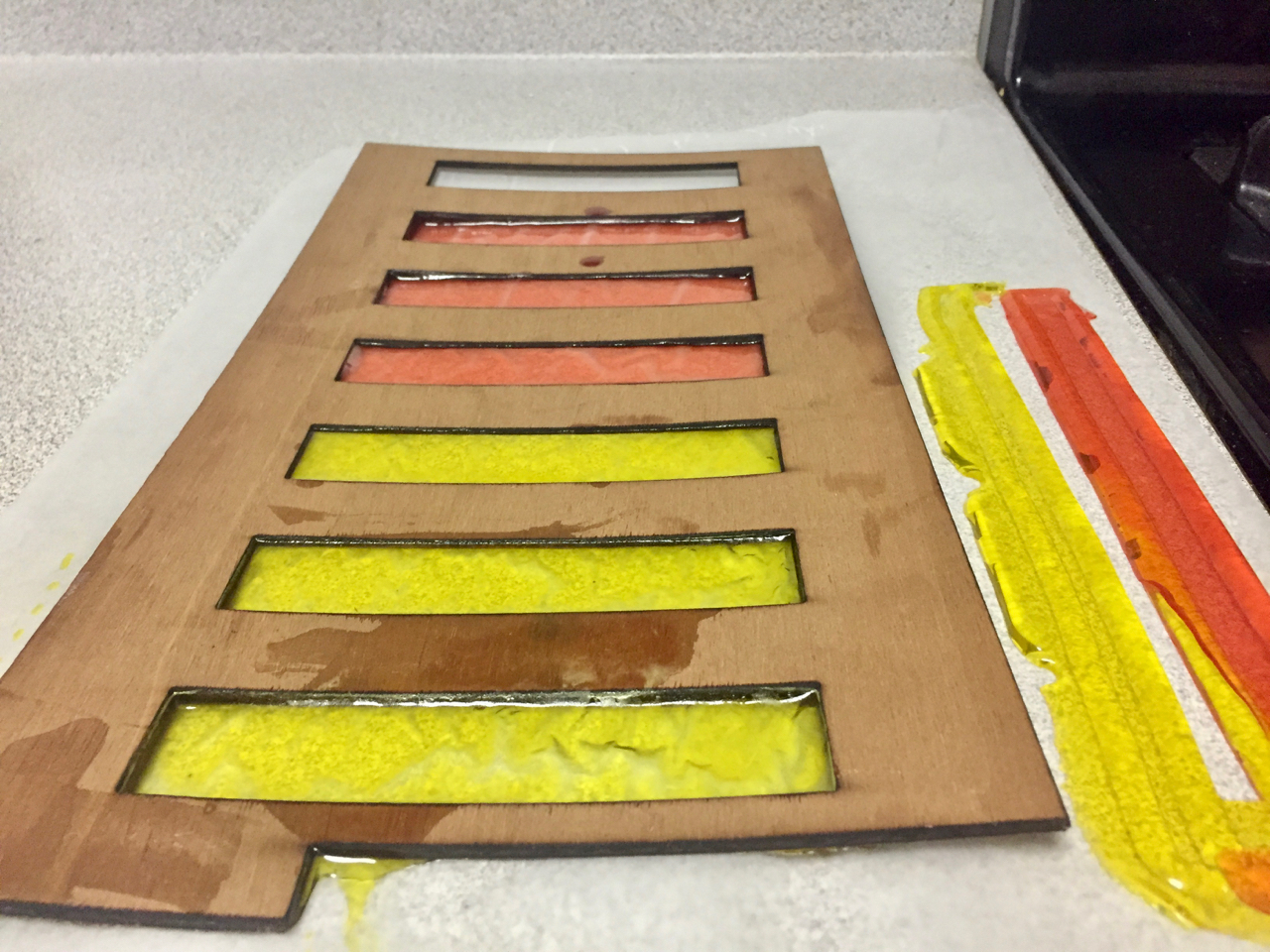

While the harder bioplastic proved to be a little too brittle, the softer variety (salmon pink) was just right.
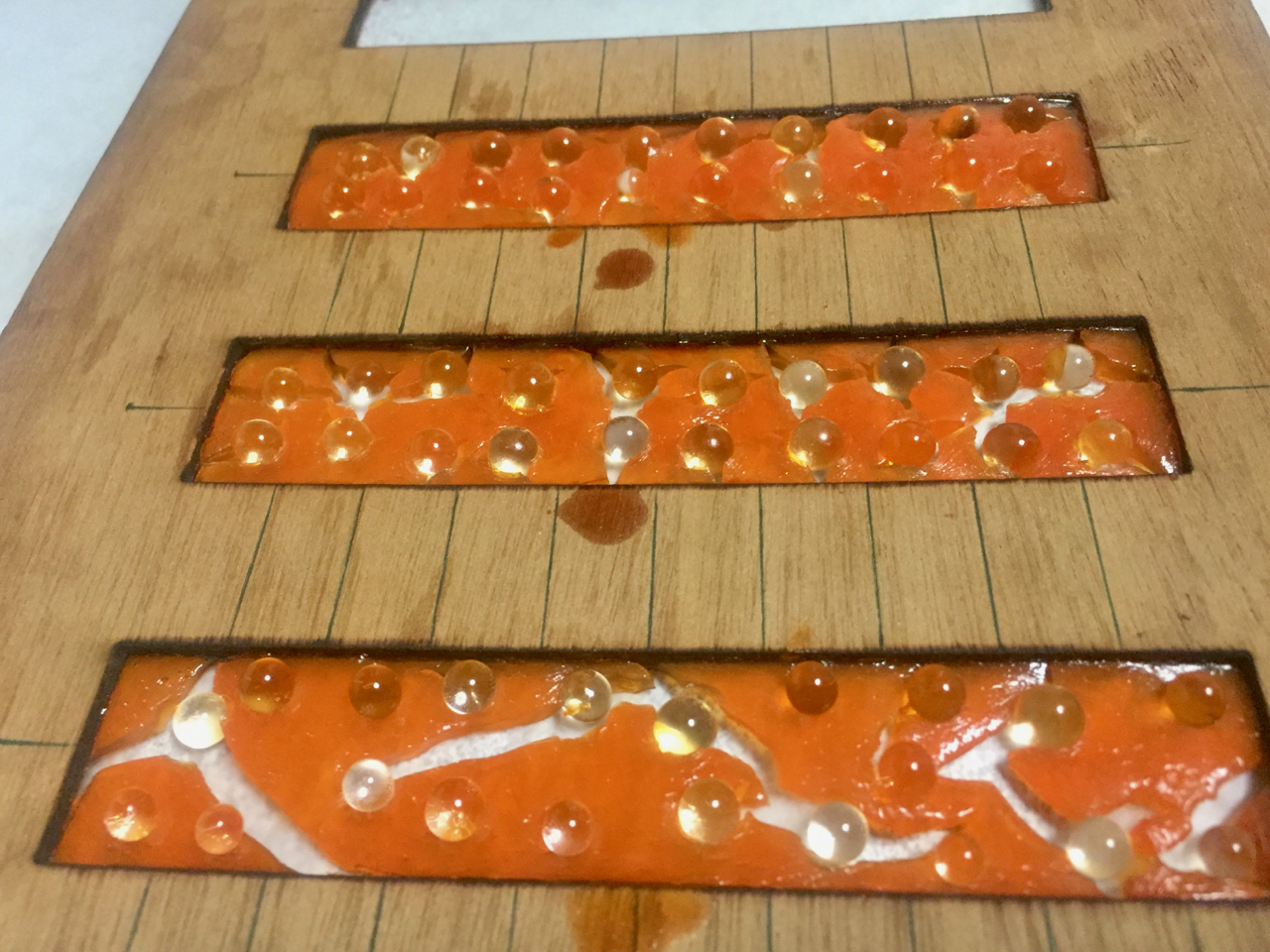
Hydrogel beads are pretty cool because they expand to 100X the size of their original size. It takes about 12 hours for a hydrogel bead to fully expand. Once saturated the material dries out slowly, morphing back to it’s original dimensions in about 72 hours.



As a control for the experiment I used a section of a flexible plastic sleeve – one single and one double layer.
I used a sewing machine to bind my gripper together. The central seam separates the right and left strings of hydrogel beads. Wrapping the stocking around I sought to minimize the seams.

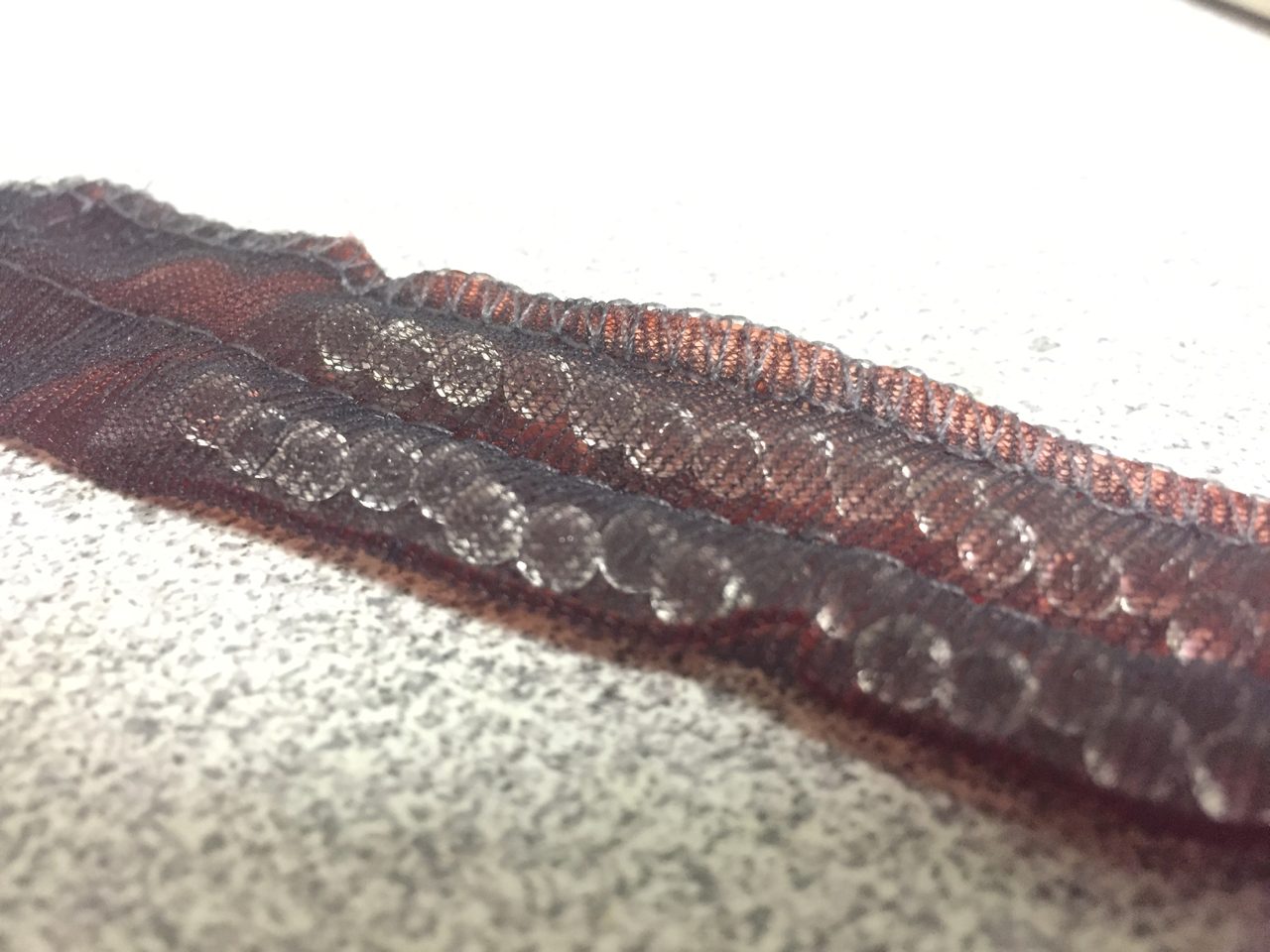
5 grippers total: – 1 bioplastic with 20 beads on both side of the plastic (80 beads total) - 2 bioplastic with 20 beads on one side of plastic (40 beads total) - 1 single plastic liner with 20 beads on one side of plastic (40 beads total) - 1 double plastic liner with 20 beads on one side of plastic (40 beads total)
Results#
After submerging the samples into water, the hydrogels expanded. To my dismay the bioplastic dissolved the the water, but the samples lined with traditional plastic seemed to do pretty well.
While overall I thought the samples were on the right track, I think the amount of beads I used was excessive – 10-11 beads would be ideal.
Also I need to bind the sample with a serger from both sides rather than just one as the beads tend to shift in the process.


Failures#
I also tried to add the hydrogel beads directly into the bioplastic mixture. Since I ran out of gelatin in my previous batch, I decided to try an agar-based bio plastic recipe. Unfortunately, the hydrogel beads absorbed the water in the bioplastic leading the samples to crack.
III. Magnetic squiggle#
Materials#
- Iron particles
- Ecoflex
- Neodymium magnets
Process#
Originally, I was keen on making magnetic “fur” by combining Ecoflex with iron particles. My assumption that by subjecting this compound to the magnetic field, I would be able to capture the spikes formed by the Iron Oxide particles.
Starting with a 1:1 (by weight) ratio of Ecoflex to Iron Oxide particles, I noticed that it was too gooey so I continued to add Iron Oxide until a 2:1 ratio.
My magnet had a relatively small circumference which provided some furry characteristics, but in very limited quantities.



Results#
After the sample dried I tested it’s behavior with a magnet. The behavior was quite interesting. As I moved the magnet, the sample shifted around as well.