11. Soft robotics#
During this week I wanted to try different types of soft structures to better understand how to design them, the air tightness when blown inside the air zones, the change of the structure.
I started with a very simple test. Inflating a sort of pillow directly with the mouth.
For the pillow I’ve used : * waxed fabric * baking paper * adhesive sheet
Textiles Based#
I did several tests with the fabric structures. I always had problems. I have tried several times to use the same pattern but there is always a part of the structure that collapses and can not contain the air…
For the soft texiles I’ve used : * waxed fabric * baking paper * adhesive sheet
Origami Pattern#
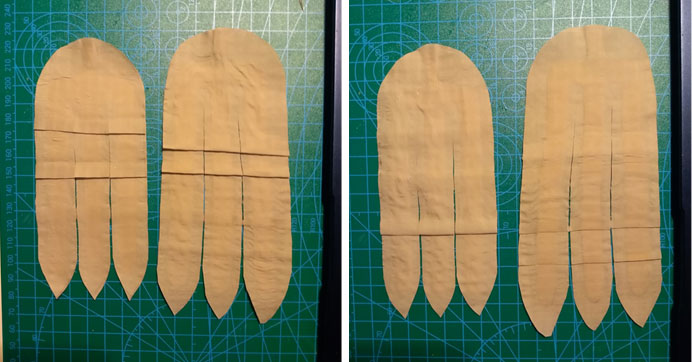
To make a first test I found a origami pattern online. I tried to figure out which parts would have housed the air and which folds should have been attached to the second layer of fabric instead.
I laser cut the baking paper to create the inner tube inside the structure.
I wanted to check the air passage before ironing the folds of the fabric origami with the iron.
I think I have drawn air channels that are too narrow (2mm). Unfortunately, the pattern does not completely swell.
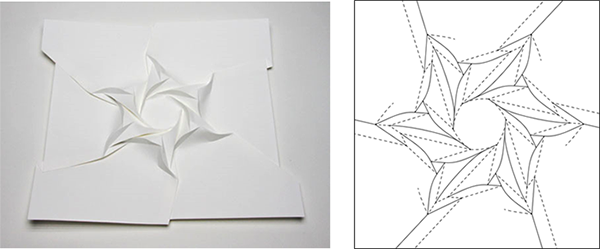
Rotation Pattern#
Paper model#
for the rotating pattern I first did a test of the structure with paper and UHU glue without drawing it with CAD programs. Even this test did not work. probably the folds and the cuts make it easier to leave holes that let air pass by not creating a good pressure to fully inflate the structure and open the folds / tentacles.

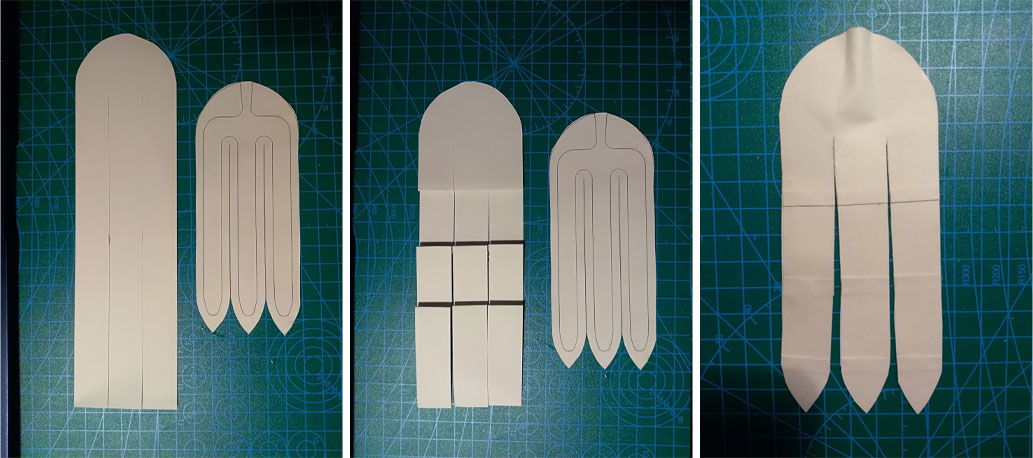
I had to redo the test and using a different method of bonding I decided to try the same structure redesigning it. I was not at Wemake so I carved the baking paper by hand by printing the design on a sheet of a4 paper.
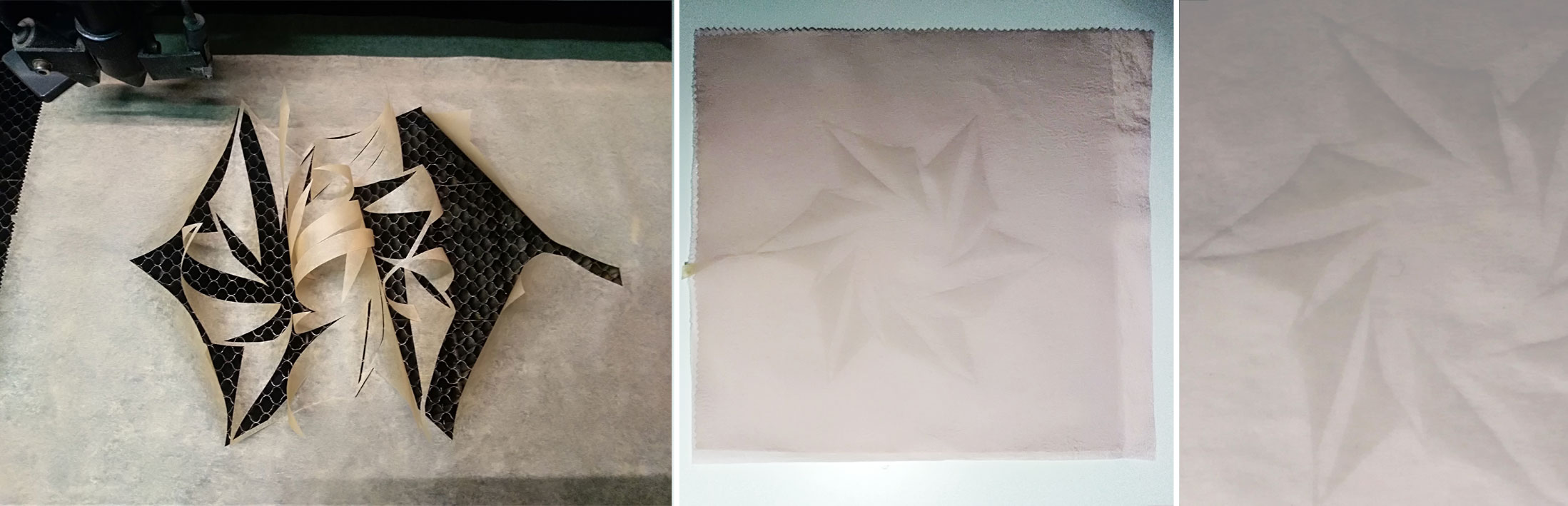
textiles model#
I tried to make folds to the layers of fabricA and adhesive but at the lower point I tried to bend the other part of fabricB but this could not be isolated from the adhesive.
This test, for this reason, does not stand the pressure.
Third proof of the structure, second with the same materials. this time I tried to block the fabric with the adhesive creating the folds. In the second step I’m going to stick the fabric with baking paper and adhesive at the base of the fabric / last layer of fabric.
Maybe I understood where the structure collapses.
Silicones Based#
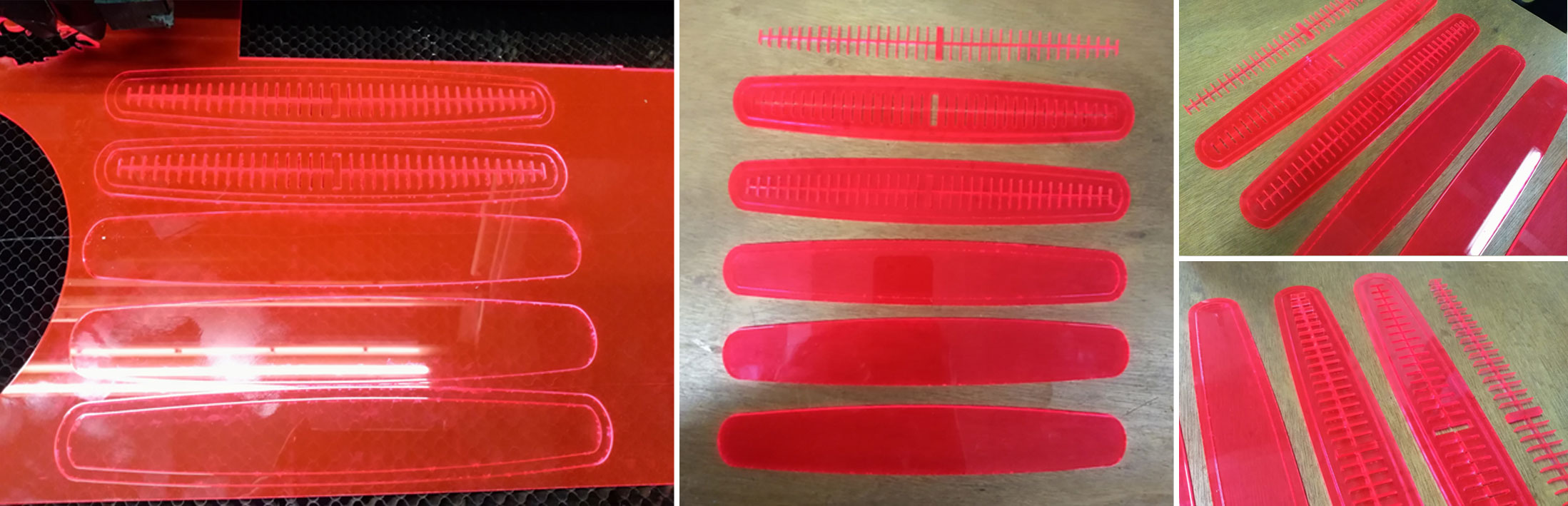
I modeled a laser-like mold to obtain a shape that could wrap the wrist like a bracelet. I inserted a larger air chamber in the middle of the shape, developing it tapered towards the ends also to facilitate the conduction of the injected air.
I created two open molds: the slat mold has three layers of plexiglass to create the bottom and the air chambers of the soft robot; the other half of the mold with the other bottom that will close the structure has two layers of plexyglass.
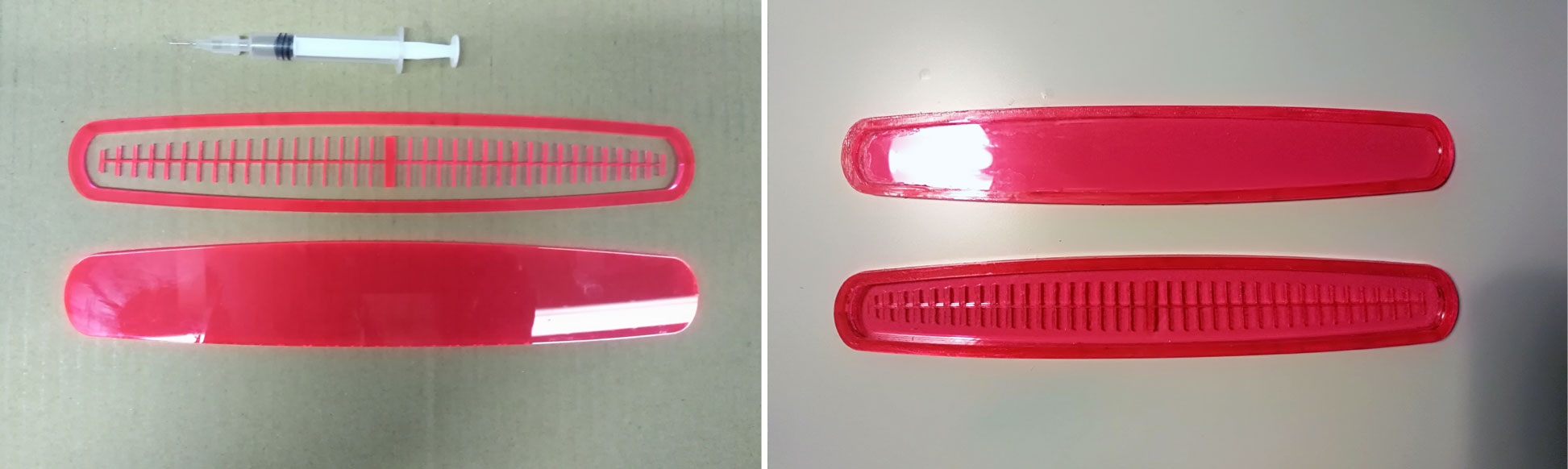

After extracting the tentacle from the mold I tried to inflate it with the needle of a syringe. In the structure there was perhaps some loss that I could not identify. The tentacle swelled only on the left side, not bending as I imagined for this problem (image below).

Biosilicone Soft Tentacle#
Although the drying times are much slower than silicone or liquid latex I wanted to try using gel-based biosilicone.
(quantity for 2 tentacles )
For the Biosilicone I’ve used:
- 19g Gelatine
- 9.6g Glycerine
- 96g water

I thought to speed up the drying process I made the mistake of putting the molds in the oven with the biosilicone. This is back liquid after a few minutes. I moved the molds in the fridge (as you do with a pudding!)
Below the comparison of the two materials used for the mold. The biosilicone is more irregular and was not suitable to be inflated.

Once extracted from the mold it was very elastic but not enough to be used for this application.

After some days the tentacle dyed. inside is clear that there’s space for the air chamber but the consistency of a fresh biosilicone is misleading. To obtain the right elasticity for the movement of the structure the biosilicone must be very fresh but when the material is very fresh it tends to flake, breaking very easily if it is filled with air.
