11. SOFT ROBOTICS#
Inspiration#
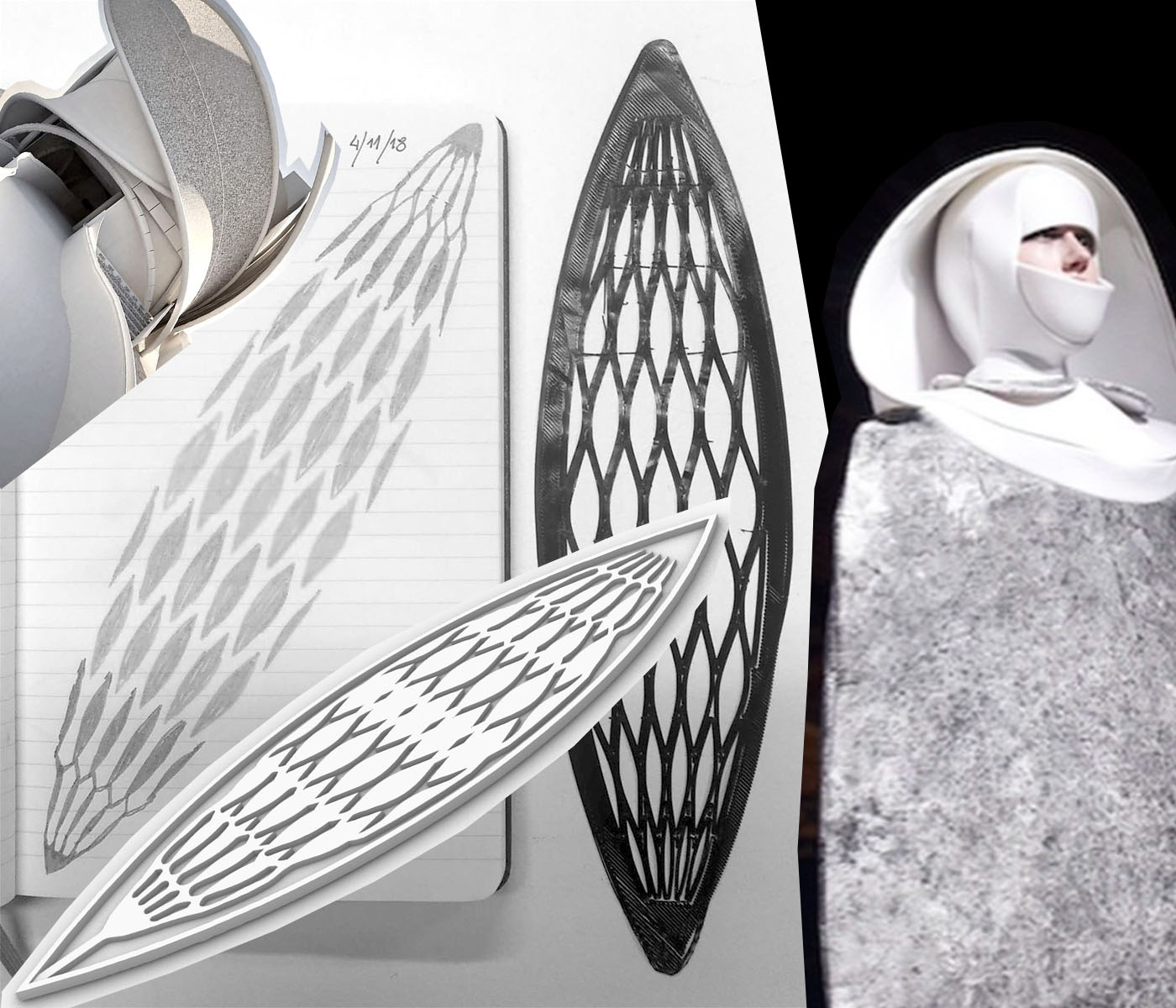
For this assigment, as in most of them, I thought of developing a soft robotics design, which can be applied to a wearer to be carried in the head: a hood or fragments of it. The hood is often an integral part of a garment, coat or raincoat (a type of large cap that covers the head and bends over the shoulders) and is often waterproof. In the design of my samples, I used soft, wavy lines, creating a torn oval shaped like a network, similar to the shape of an eye’s outline. My initial intention was to achieve the bow on a horizontal axis, so that this shape fits the spherical of a head. For this, I had to build different samples modifying the air flow patterns and thus be able to check and observe how the soft actuators behaved.
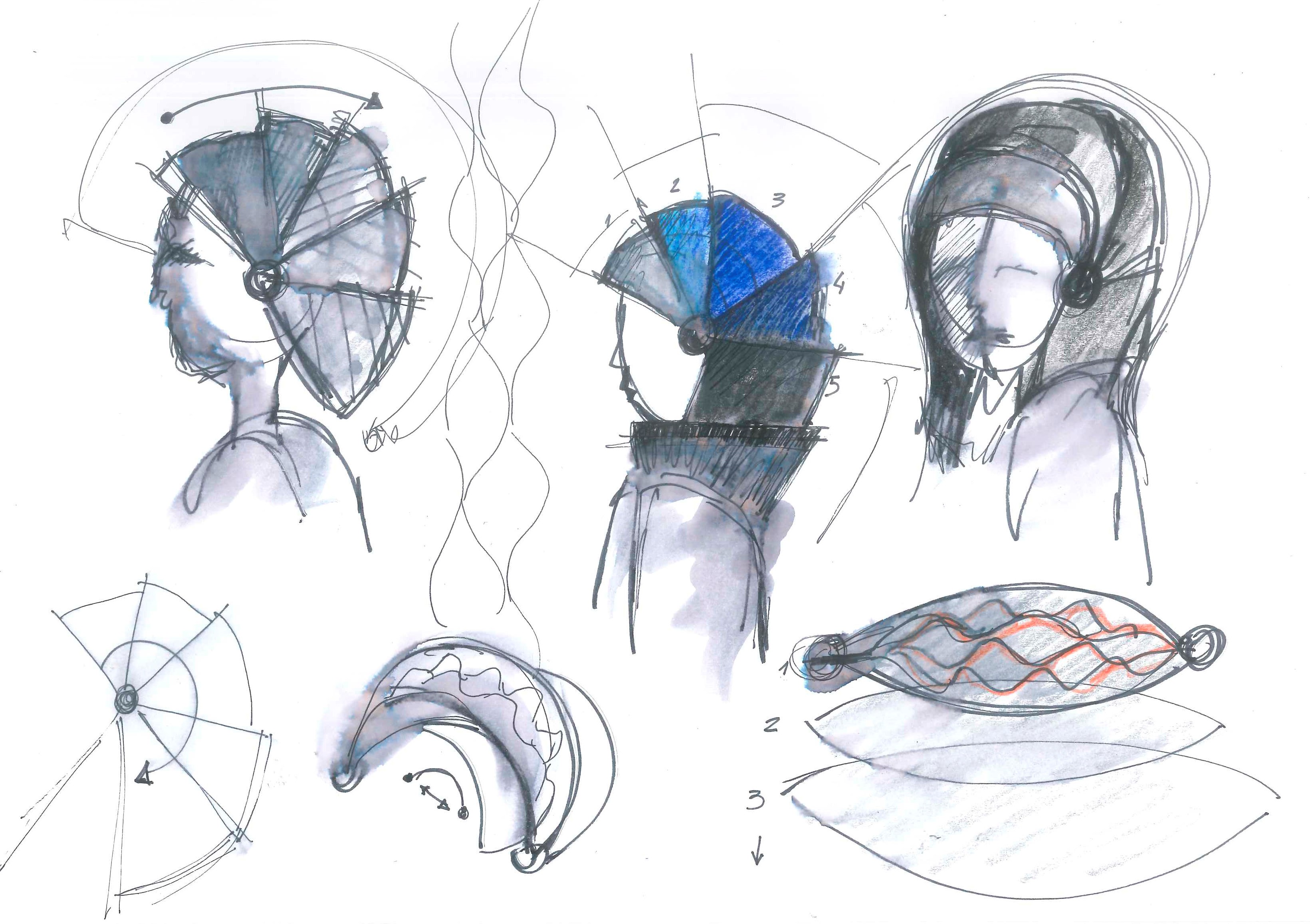
- Examples of head accessories with inflatable qualities

-PROYECTO VISUO - SOFT HOOD AIR
Process / Soft Robotic sample / Thermovynil#
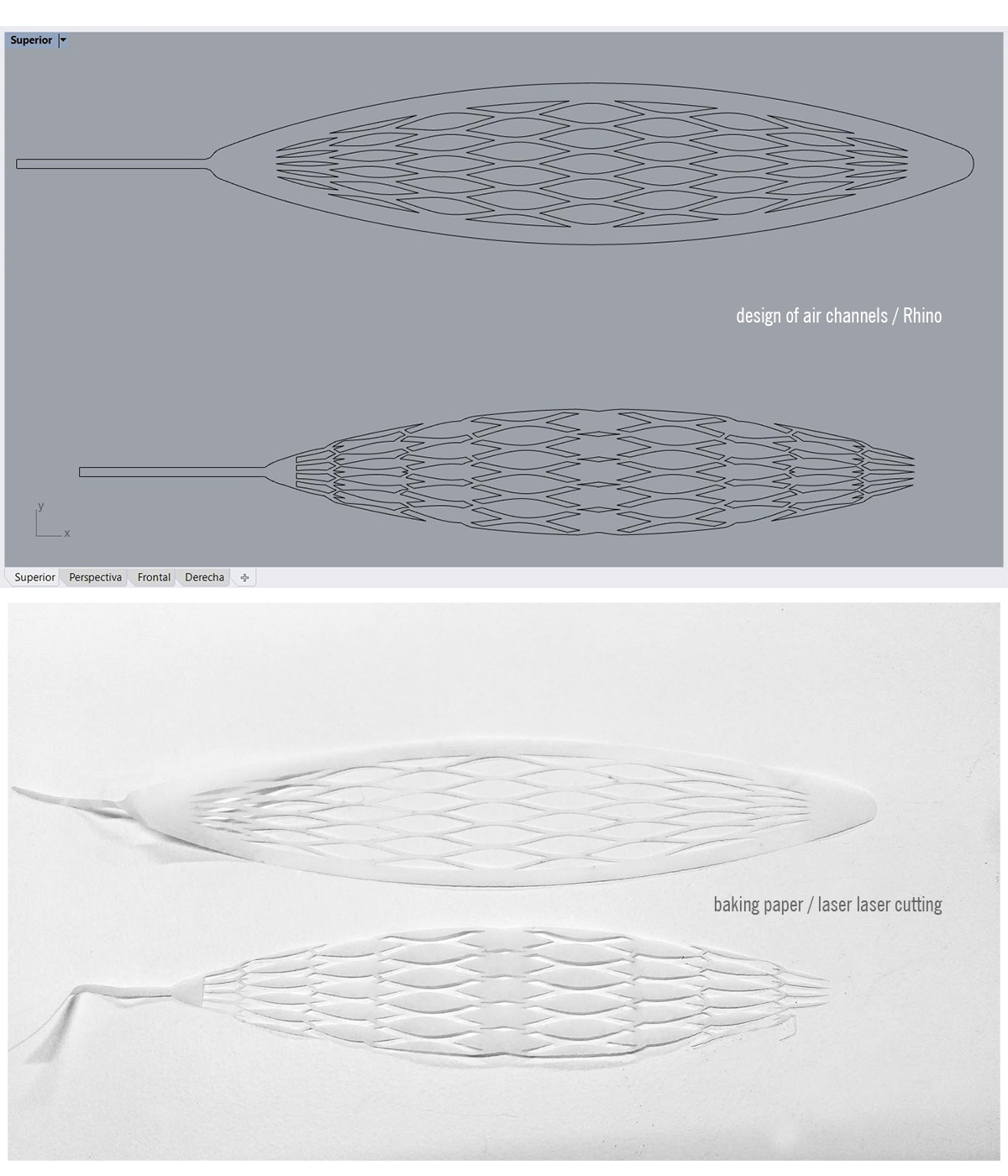
- Continuing with a morphological axis that had been working in previous weeks (plot achieved in Grasshopper) I took the design in 2D and manipulated and adjusted it in Rhino to achieve a suitable design for the flow of the air channels. To verify how they acted pneumatically, I used the positive and the negative of said plot. Always creating communication between channels so as not to interrupt the flow of air.
-
The next step was to laser cut the design of the air channels in kitchen paper; this is necessary to place it in the middle of 2 thermovinyl clippings. The paper obstructs the contact between the thermosetting surfaces and leaves it free for subsequent inflation.
-
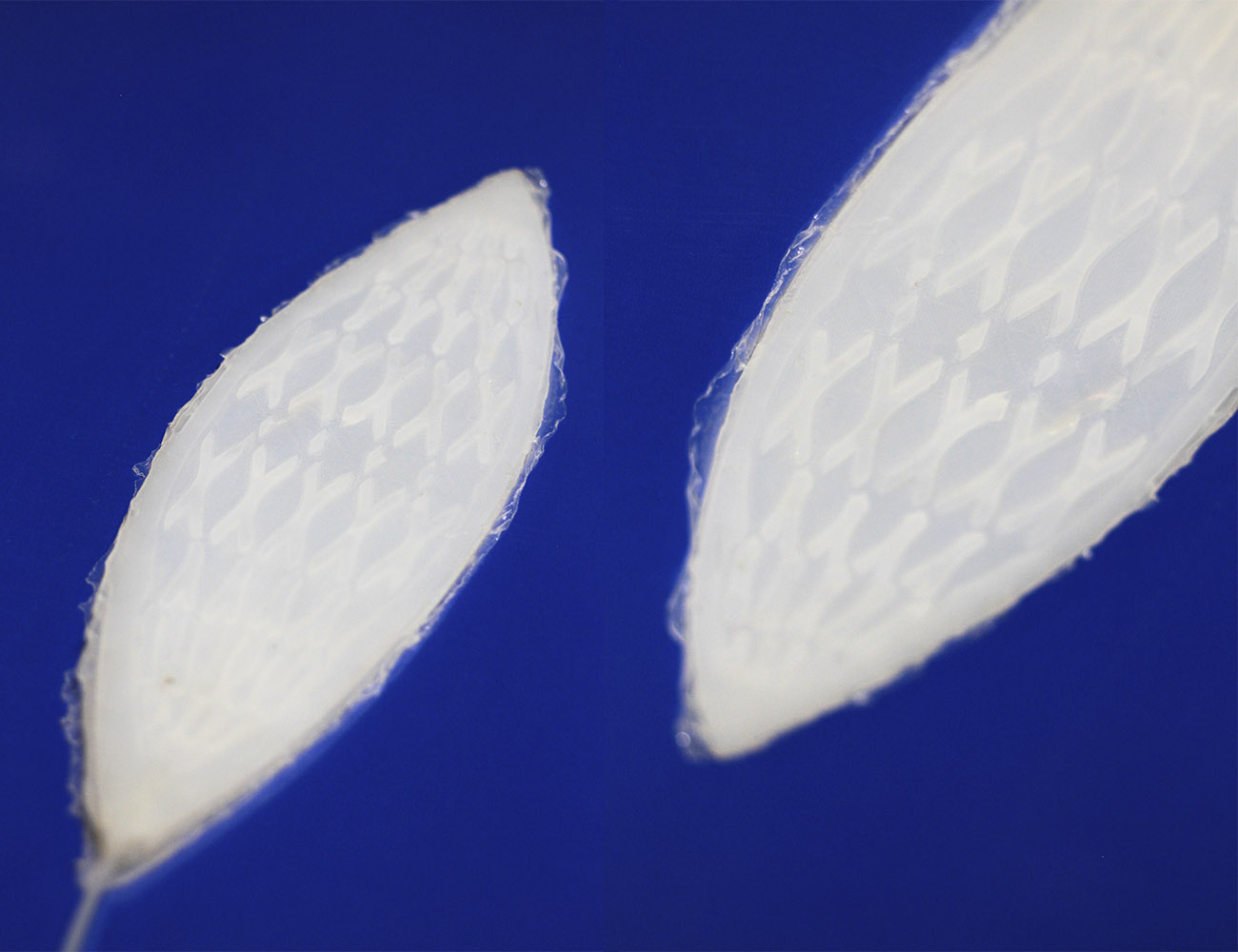
It was surprising to observe the great difference between how the different samples responded to each other when inflating them, generating totally opposite movements and material constriction.
Week 11. SOFT ROBOTICS - Test 1 from Betiana Pavon on Vimeo.
Week 11. SOFT ROBOTICS - Test 2 from Betiana Pavon on Vimeo.
Process / Soft Robotic sample / Silicone#
- Once the samples were made in Termovynil and observing the behavior of the material in correspondence with the design of the airflow pattern, I decided to opt for one of them (the one that responded better to the air injection). To optimize the air flow, I had to modify some parameters (in my 2D diagram) regarding the scale. It is important that the air channels do not have very angular paths and that minimally they have 3mm of width, to avoid obstructions and unwanted folds.
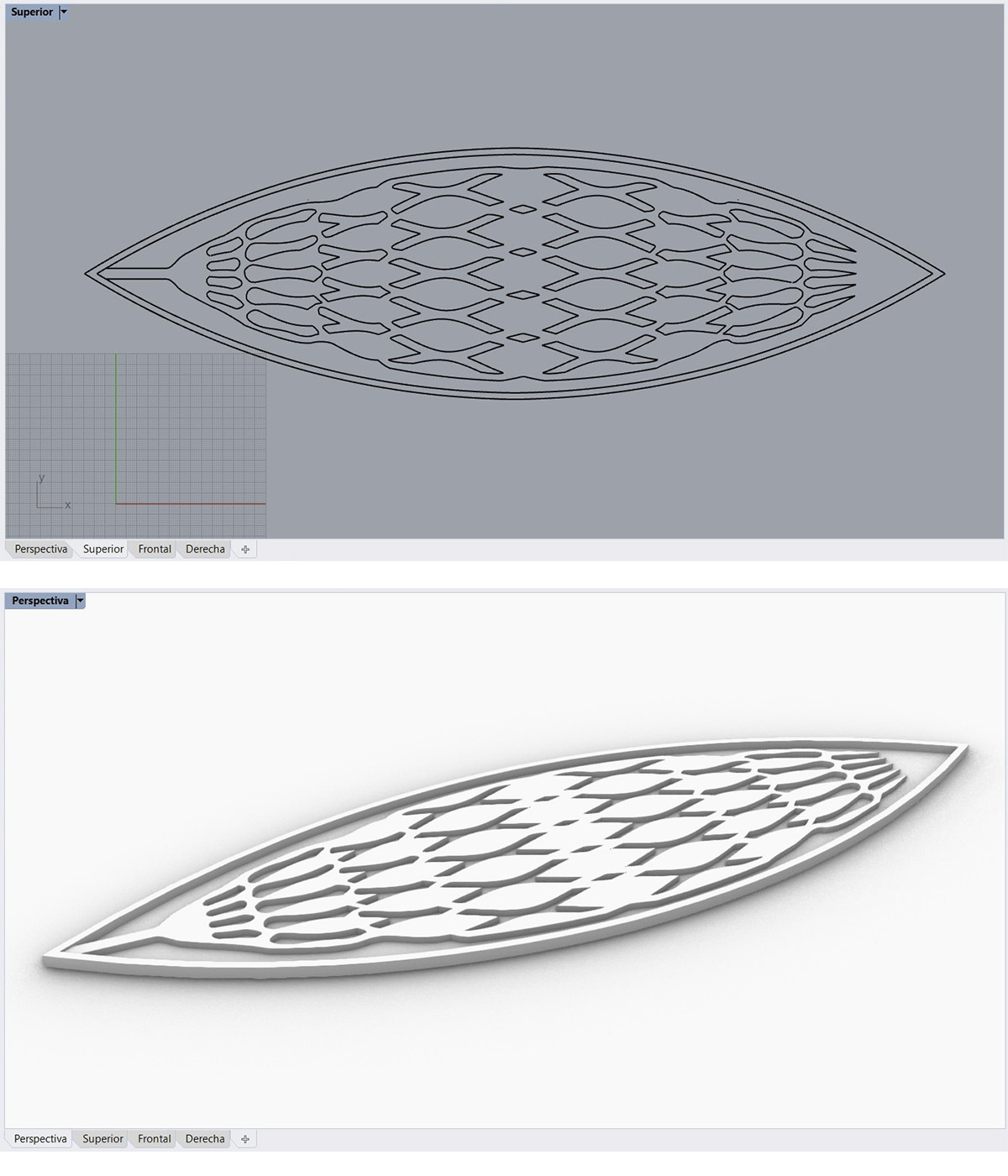
- The next step was to convert the drawing into a 3D mold, to be printed (PLA material). To do this, the negative must be extruded, so that with the subsequent silicone filling, obtain the positive pattern. That is, I extruded the base, on it the pattern of the air flow (which should be empty) with a height of 2mm) and an outline of the general oval shape with an upper height (3.5mm) that acts as a container of the liquid material (silicone) and allows to fill and form a thin layer of such material as a closure, which allows the subsequent inflation and expansion of the material with the entry of air. The other piece is only the flat shape of the general outline, to achieve it only laser cut said form in acrylic. It can be fixed with tape or glue to any non-stick surface.
Molding step by step#
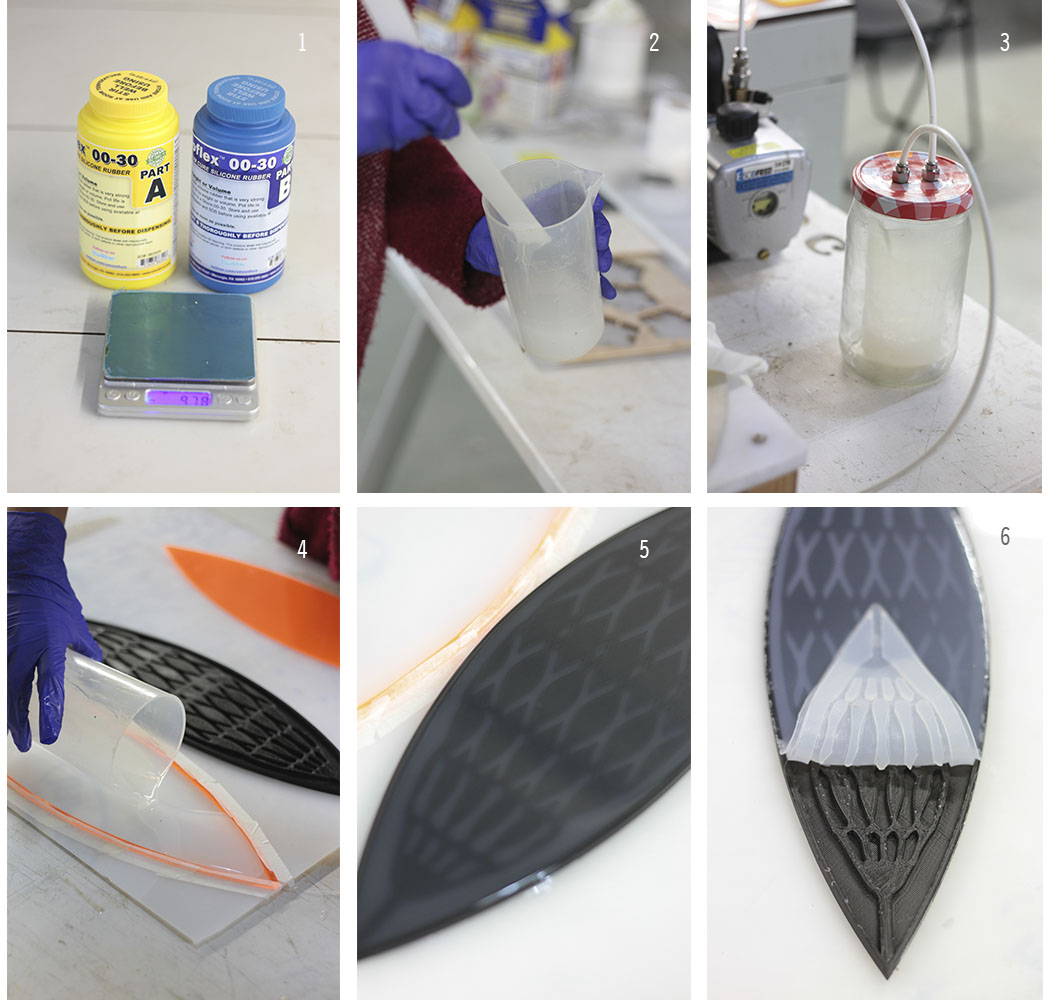
- 1 The material used was Eco-Flex silicone (ideal for soft robotics). It is very important to follow the instructions and setting times; For this, a balance is necessary, weighing the exact same amount of component A and component B.
- 2 Mix the 2 components energetically, for a time not longer than 3 minutes.
- 3 To be able to use this material in Robotics it is necessary that it does not have impurities or bubbles (since this would affect the morphology of it, when inflating it). For this it is necessary to introduce the mixture in the vacuum machine (for a time no longer than 10 minutes) until observing the surface and see that bubbles no longer appear floating.
- 4 Pour the resulting mixture in the 2 parts of our mold, it is important that the resting surface is level, since if the resulting material has different thicknesses it would affect the robotic performance of it.
- 5 Fill the molds to the edge, especially in the one containing the airflow pattern, to ensure that the uniform thickness is obtained in the upper part, which will then be the support of the same. Allow to set and dry, minimum 6 hours (depending on the type of silicone used).
- 6 Carefully demold the 2 parts of our piece. To join and seal the base with the “lid” the same material (eco-flex) is used, applying with a spatula or brush carefully over the entire contact surface, I recommend starting with the internal surface (pattern) to place the tube that will allow the inflated to the right diameter, carefully place the flat piece on top and finish with the edges.
Week 11. SOFT ROBOTICS - Test 3 / Silicona from Betiana Pavon on Vimeo.
Week 11. SOFT ROBOTICS - Test silicone from Betiana Pavon on Vimeo.
Conclusions and observations#
I found the exploration and observation of different materials and pattern designs extremely interesting; since until you build it completely, you can not see what will happen in terms of the “robotic movement”. It is a path of endless exploration. Regarding the sample made with silicone, the inconvenience I had was not enough time to dry the silicone that acted as a glue between one part and another, which caused that when the air enters for the first time it took off in some sectors and leaks of air in on the sides; this made it difficult for the air flow to be evenly distributed. Likewise, a clear difference can be observed in terms of the behavior of the material and its physical characteristics that allow to change from a plane to volume with expansion capacity. Undoubtedly, it is an issue that I plan to continue investigating, since the ability of “metamorphosis” that allows the application of soft robotics to a wereable is attractive, fascinating and innovative.