12. Soft robotics¶
"This class focused in the study of a specific field in robotics, the soft robotics. Unlike rigid robots we are mostly used to, soft bodied robots have similarities and performance characteristics similar to living organisms or the human body. Soft-robotics are based in Bio-inspired design or biomimicry and have applications in wearables, rehabilitation prosthetics, surgical robots, rescuing and others. We focused on the fabrication of soft actuators, sensors and grippers using novel materials, artificial muscles and performative locomotion design."
References¶
Octobot¶
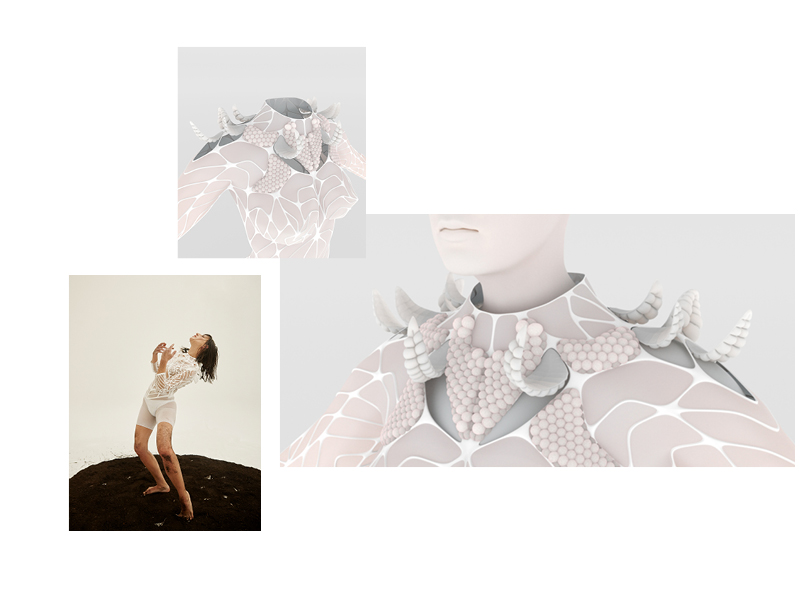
Sense of nature¶
by Adriana Cabrera, Montse Ciges & Moon Ribas
EUVEKA¶
Smart morphosizing - Scalable and connected robot mannequins
Work of the week¶
Tutorial 1 :¶
Biomimisic - MotorSkin project presentation :
Method of soft robots :
1 : Artificial muscles
With several fabric : Add a valum tube in knit tube (or other surface...) Connect with a pump, a pressur.
Skeleton fabrication (origami)
2 : Inflatable : Custom design with iron on vinyl
How to do an inflatable in the lab ? Vinyl sheets (thermo vinyl) + baking paper (in sandwich) Need : sincle tap (serflex), tube
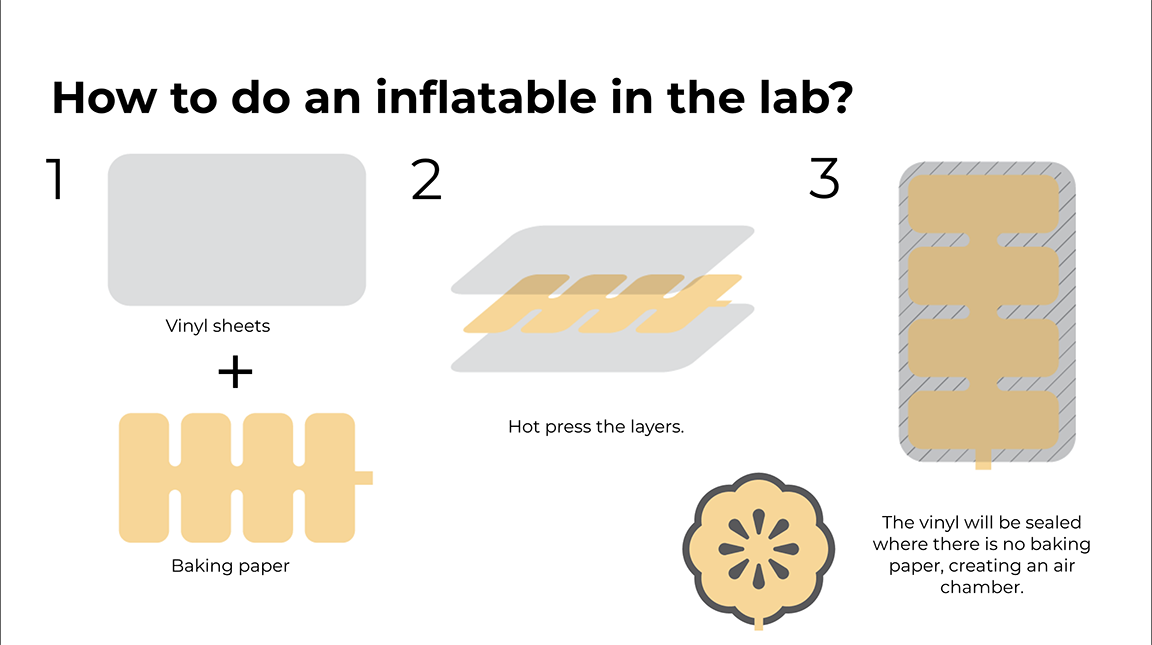
- Design (a pattern to cut with laser cuttinh)
- Prepare to print in silhouette
- Seal the vinyl in the hot press (we can use an iron press)
- Inflate (with air pump)
Experimentation¶
Next the tutorial, I tried to do an inflatable with iron on vinyl.
I created my pattern on a baking paper. Then I add my baking paper between two termo-vinyls and I heated the sanwitch with an iron press (setting synthetic) with a protection on the top.
Test 1 :

Test 2 :
Tutorial 2¶
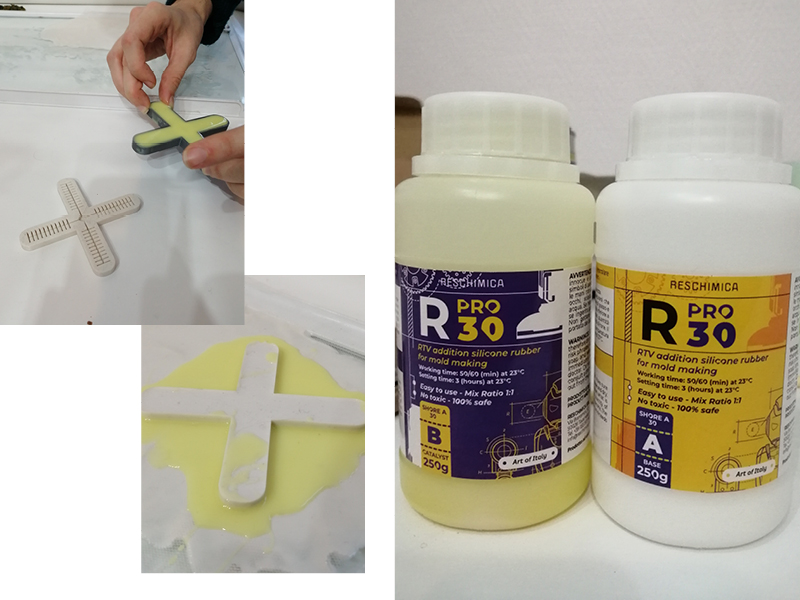
Adriana showed how to create a mold in 3D (with 3D printing) or in 2D (with laser cutting).
Then, she showed how to create several inflatables molded with silicone are biomaterials (bio silicone)
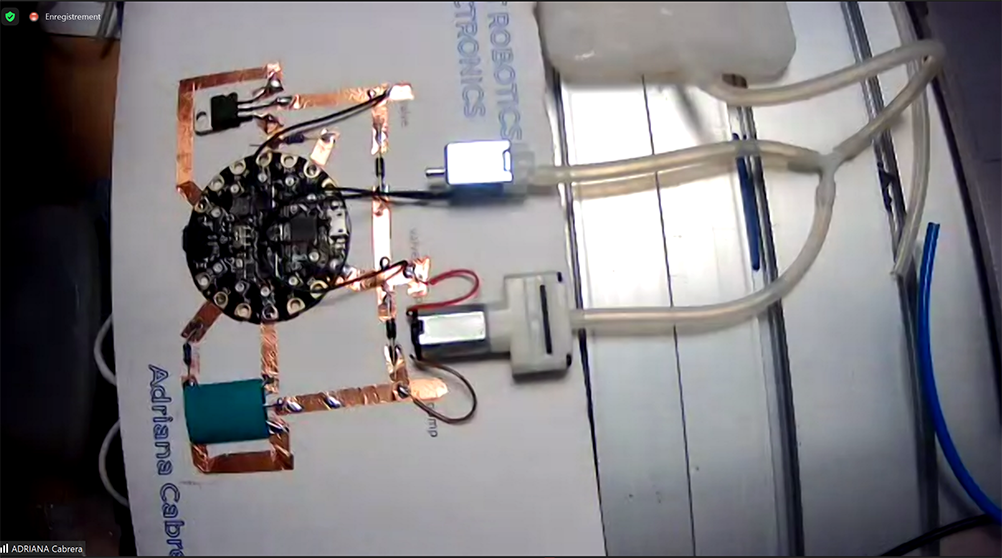
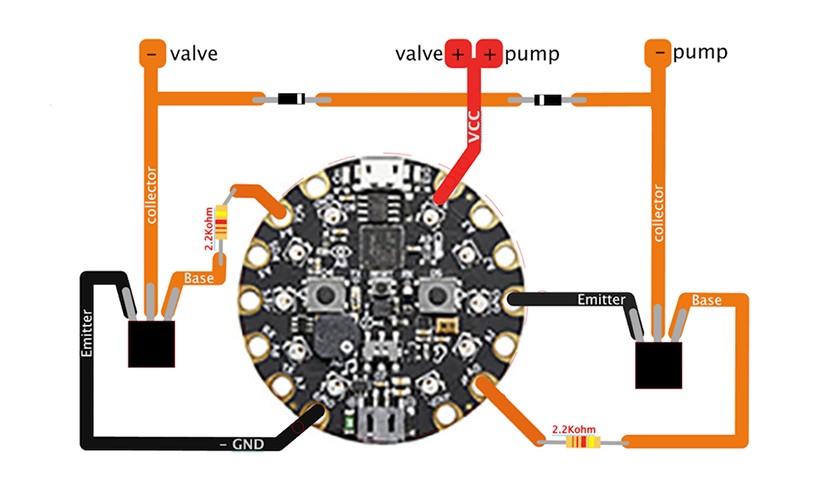
Finally, she showed an electronic circuit with two pumps, an hardware Arduino, and a mosfet transistor (see week 8) for the both pumps, to controle the inflatable.
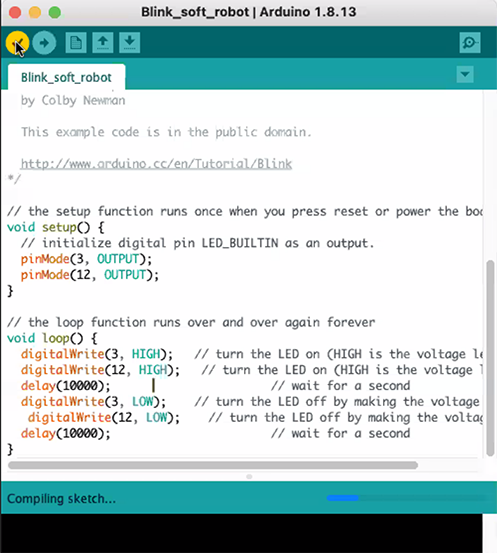
BLINK function
int air=9;
// the setup function runs once when you press reset or power the board
void setup() {
// initialize analog pin "air" as an output.
pinMode(air, OUTPUT);
}
// the loop function runs over and over again forever
void loop() {
digitalWrite(air, HIGH); // turn the air pump on (HIGH is the voltage level)
delay(1000); // wait for a second
digitalWrite(air, LOW); // turn the air pump off by making the voltage LOW
delay(1000); // wait for a second
}
I created my 2D mold with illustrator, to cut with the laser cutting.
I can't make it for now, because the TextileLab laser cutting has a problem. I hope to make it soon and casting silicone inside.
Also, we tried to mold silicone with the 3D print mold made by Diane the last year.
Manufacturing of Soft Robotics : To know more how to do > link
Useful links¶
- Lecture of the week
- Soft Robotics Tutorials with Adriana Cabrera - Part 1
- Soft Robotics Tutorials with Adriana Cabrera - Part 2