12. Soft robotics¶
Inspiration¶
What I associated with "inflatables":

In the class, lots of interesting cool projects: organic-like robots, padded robotic arms...
What I find the most interesting is the intersection of wearables and soft robotics, and the ideas of compression and protection.
Hug Shirt¶
Sense-Roid: hug yourself https://www.novriki.com/sense-roid-en/ Already mentioned in week 5
Inflatable Hood¶
http://wiki.textile-academy.org/fabricademy2017/students/julie.taris/final_projectpresentation https://hovding.com/ https://www.inflabi.com/ http://shoparos.com/#about
I thought making an inflatable hood associated to a sensor that would detect being tired or distracted to protect myself from falling down the street would be a good idea.
References¶
https://class.textile-academy.org/2022/saskia-helinska/finalproject.html
Grasshopper Inflatable Simulation tutorial: https://www.youtube.com/watch?v=HneukatzElw
Soft Robotic Toolkit Tutorial: https://softroboticstoolkit.com/resources-for-educators/pneuwrist-brace
Louise's documentation: https://class.textile-academy.org/2022/louise-massacrier/Assignments/week12/#vinyl-soft-robotics-pattern
Making the inflatables¶
I personally find soft robots made of gooey biomaterials or silicon to be quite icky, so I chose to focus on building inflatables out of non-organic-looking materials. Two techniques seemed particularly interesting to me:
- vinyl + baking paper
- plastic sheets + 3D printer extruder
Due to time constraints I only experimented with the first one, but others such as .... got interesting results with the 3D printer method.
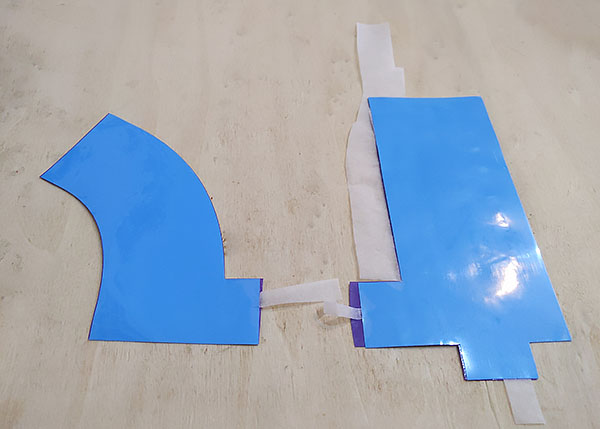
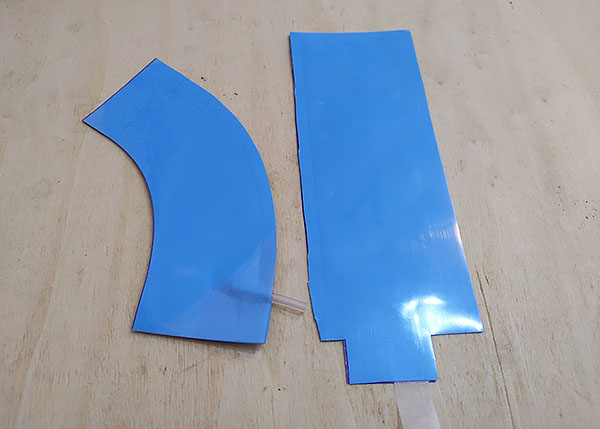
Vinyl + Baking Paper Method¶
two layers of vinyl are fused together, with baking paper inserted in the middle that prevent fusing in specific areas, leaving space for air to get in
Designed the samples parametrically in grasshopper, then used the scan&cut machine to cut the vinyl and baking paper
Issues with the machine, vinyl had trouble adhering to the mat, baking paper was even worse
Retrospectively I would have cut by hand
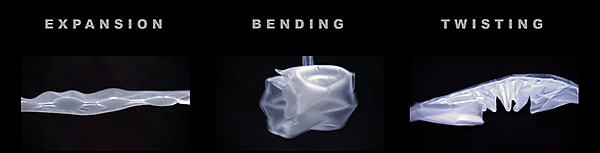
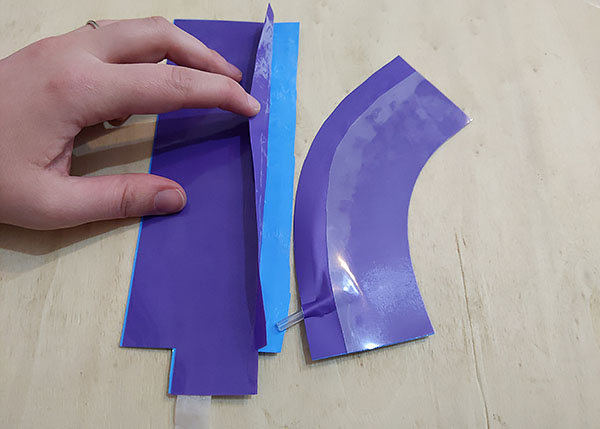
Bending¶
grasshopper code



Twisting¶
grasshopper code



Seaming¶
Vinyl sheets are 25 x 25 cm, so in order to make a larger projects one would need to seam several pieces together.
I decided to experiment with seaming two pieces while leaving a path for air to flow between them
FAIL







maybe if using a tiny iron like this: https://www.rascol.com/mini-fer-a-repasser-p-237118
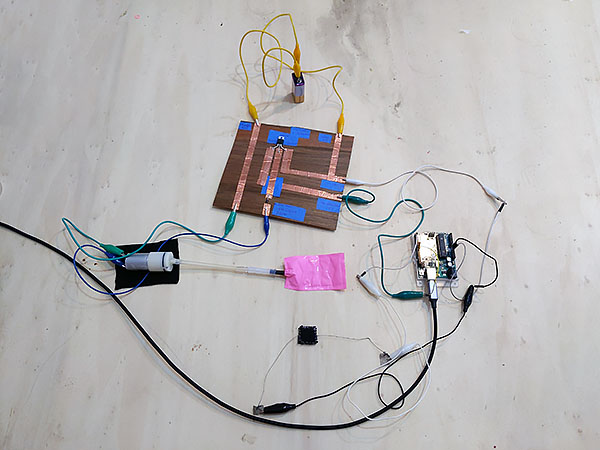
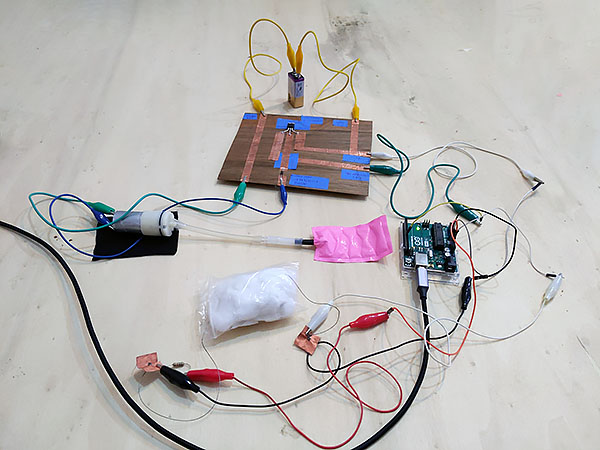
Powering the inflatables with Arduino¶
Inflatable On/Off¶
circuit
const int AIR_PIN = 9;
void setup() {
pinMode(AIR_PIN, OUTPUT);
}
void loop() {
digitalWrite(AIR_PIN, HIGH);
delay(5000);
digitalWrite(AIR_PIN, LOW);
delay(5000);
}
Digital Sensor + Inflatable¶
circuit diagram
const int DIGITAL_SENSOR_PIN = 8;
const int AIR_PIN = 9;
int digital_sensor_value = 0;
void setup() {
pinMode(DIGITAL_SENSOR_PIN, INPUT_PULLUP); //initialize the sensor pin
pinMode(AIR_PIN, OUTPUT); //initialize led pin
Serial.begin(9600);
}
void loop() {
digital_sensor_value = digitalRead(DIGITAL_SENSOR_PIN);
if(digital_sensor_value == LOW){
digitalWrite(AIR_PIN, HIGH);
Serial.println("Air on");
} else {
digitalWrite(AIR_PIN, LOW);
Serial.println("Air off");
}
}
Analog Sensor + Inflatable¶
circuit
const int ANALOG_SENSOR_PIN = A0;
const int ANALOG_SENSOR_MIN = 500;
const int ANALOG_SENSOR_THRESHOLD = 1000;
const int AIR_PIN = 9;
int analog_sensor_value = 0;
void setup() {
pinMode(ANALOG_SENSOR_PIN, INPUT);
pinMode(AIR_PIN, OUTPUT);
Serial.begin(9600);
}
void loop() {
analog_sensor_value = analogRead(ANALOG_SENSOR_PIN);
Serial.println(analog_sensor_value);
if (analog_sensor_value<ANALOG_SENSOR_THRESHOLD)
{
analog_sensor_value = map(analog_sensor_value, ANALOG_SENSOR_MIN, ANALOG_SENSOR_THRESHOLD, 255, 50);
analogWrite(AIR_PIN, analog_sensor_value);
} else
analogWrite(AIR_PIN, 0);
delay(50);
}