12. Soft robotics¶
Research¶

"This class will focus in the study of a specific field in robotics, the soft robotics. Unlike rigid robots we are mostly used to, soft bodied robots have similarities and performance characteristics similar to living organisms or the human body. Soft-robotics are based in Bio-inspired design or biomimicry and have applications in wearables, rehabilitation prosthetics, surgical robots, rescuing and others. We will focus on the fabrication of soft actuators, sensors and grippers using novel materials, artificial muscles and performative locomotion design"
References & Inspiration¶
Anicka Yi¶
I wasn´t really connecting with this assignment until I ran into Anicka Yis beautiful work, exclusively the Hyundai commission for the Tate Modern.

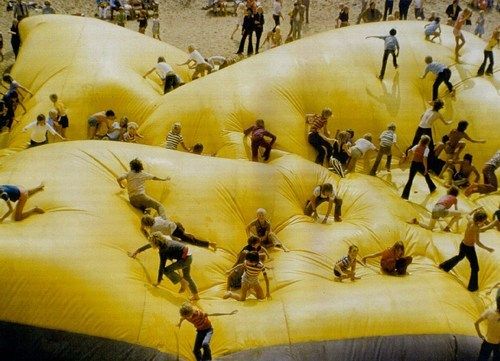
Geraldo Zamproni¶
Something I noticed as well, was inflatables around arquitecture. This combination of these soft structures with such rigid modern architectural spaces really captivated me so my references come more from architecture and product design where these materials have been used succesfully.

Inflatables/Architecture/Design
Tehila Guy 2014¶
ANDA chair.

Tools¶
- [Rhino3D](https://www.rhino3d.com)
- [Ultimaker](https://ultimaker.com)
Process and workflow¶
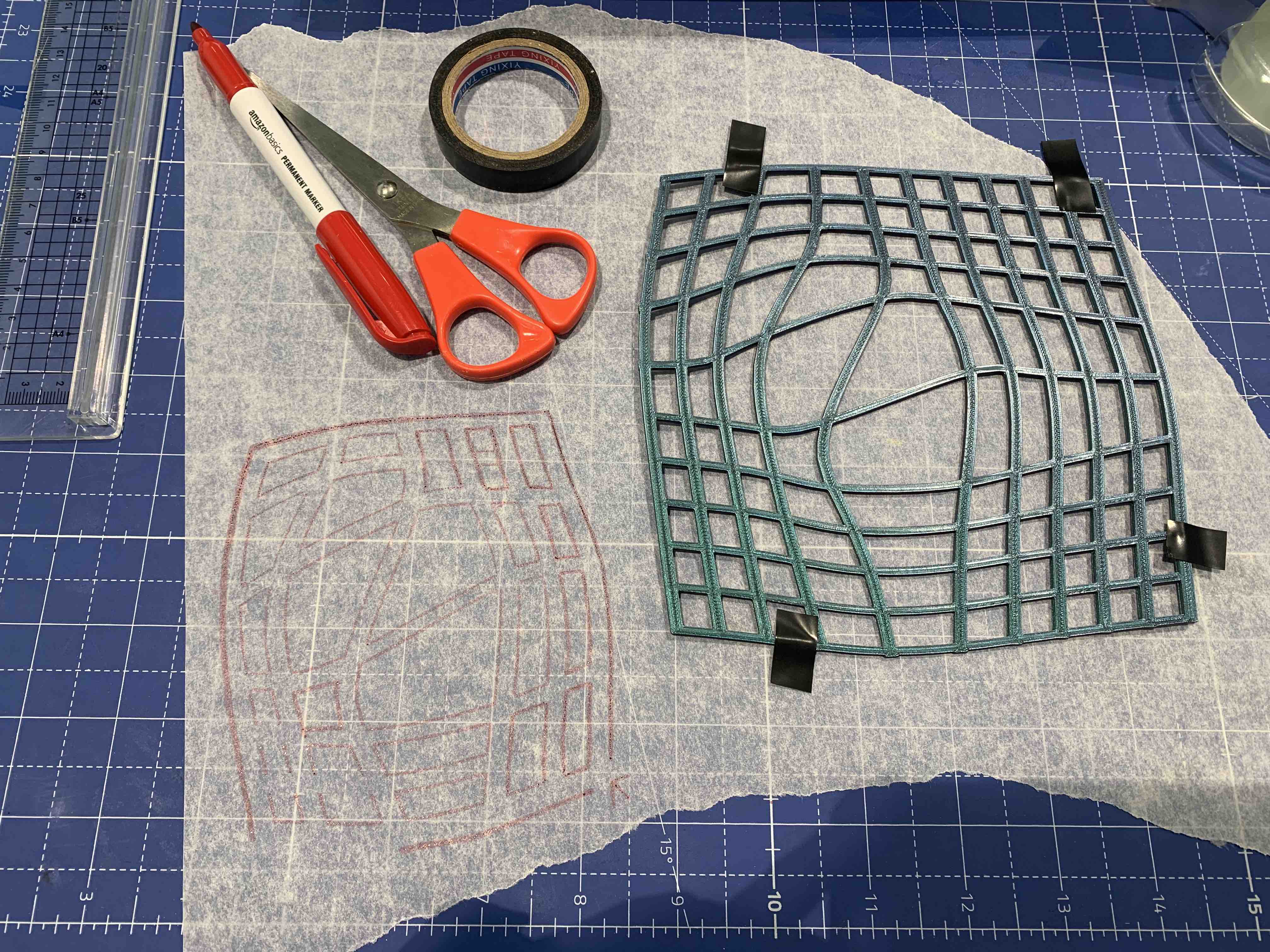
This model was obtained by reusing the grid I had 3D printed from computational couture week. Through out my assignments I have tried to re use, recycle assignments, colors and materials to understand all the applications that these exercises can have.
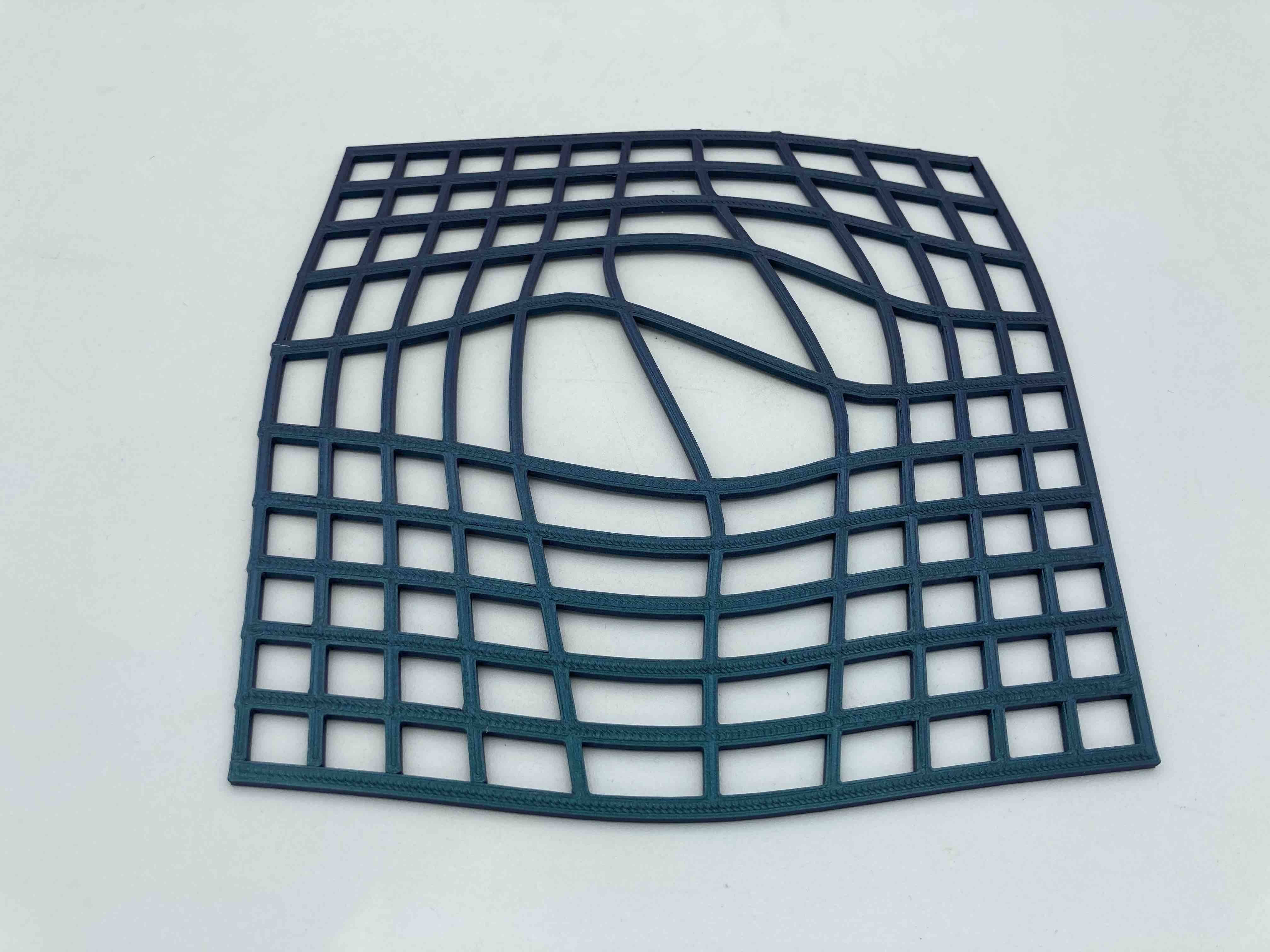
Step 1¶
Draw over the grid like a stencil to cut out the paper.
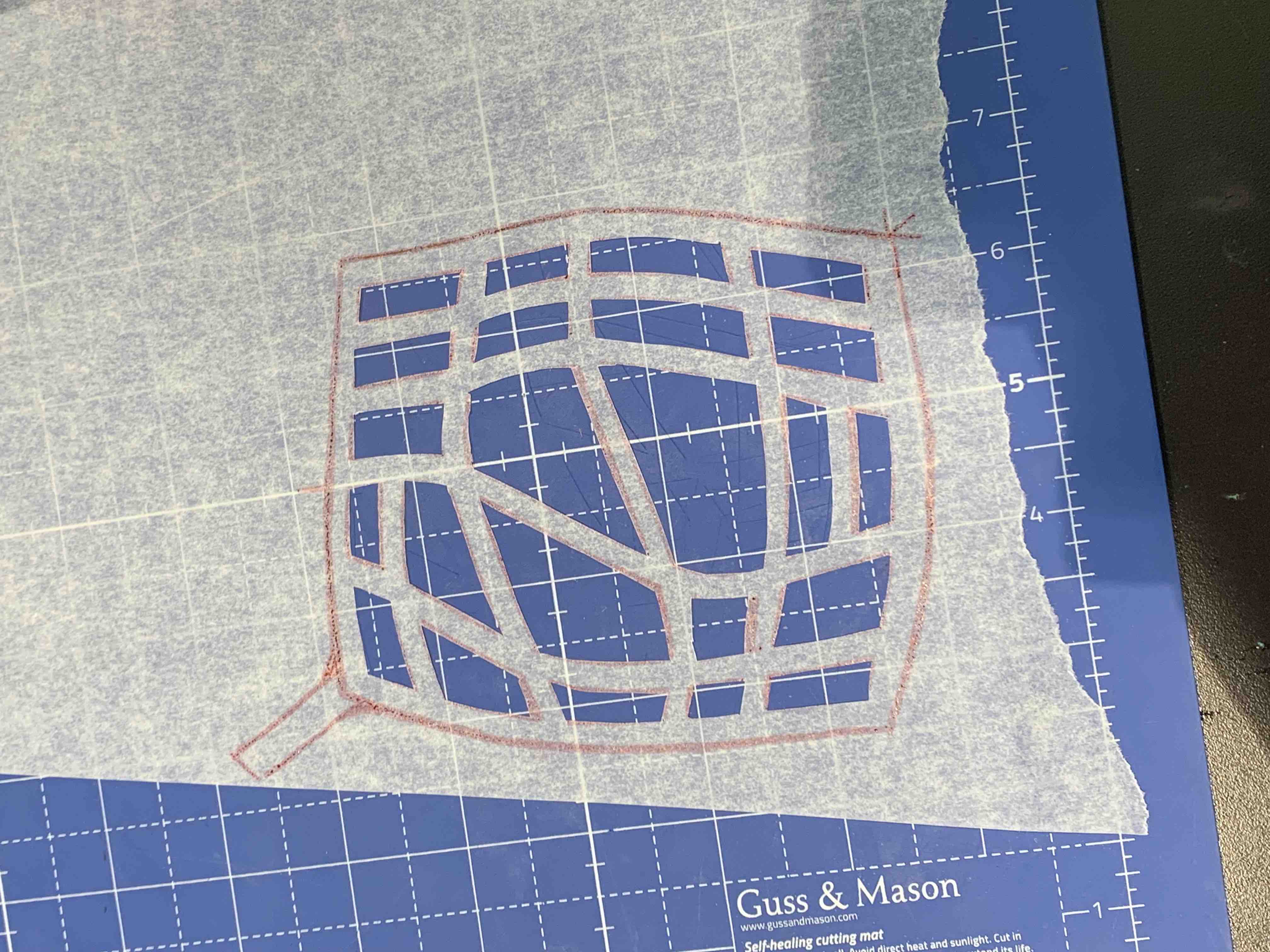
Step 2¶
Cut out the inner part so the vinyl will stick and allow the air to pass through the grid.
Step 3¶
I placed the grid all cut out into two vynyl squares, with enough space to cut around. The most shiny/rigid skin of the vinyl goes outside as you can see in the gif below. The vinyl was heat pressed for about 4 minutes in each side.

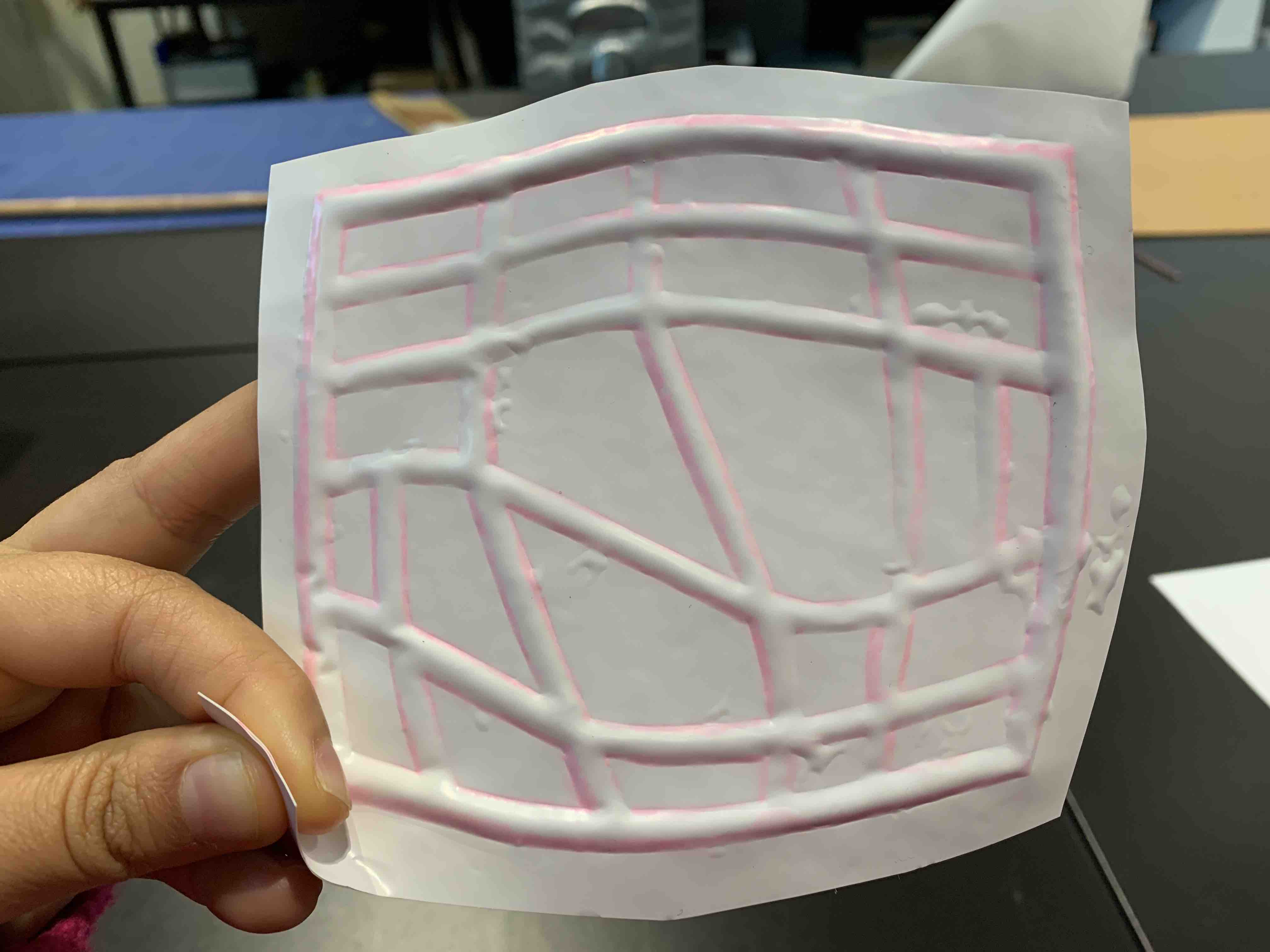
Step 4¶
After removing the rigid plastic cover from the outside, the vinyl became softer.
Protoype 1; Vinyl¶
I was quite pleased with how quickly this first protoype came out, the heat pressed did not stick the vinyl perfectly, maybe because some impurities got stuck between the faces but overall, I was ok with this result so now I can move on to a silicone prototype.
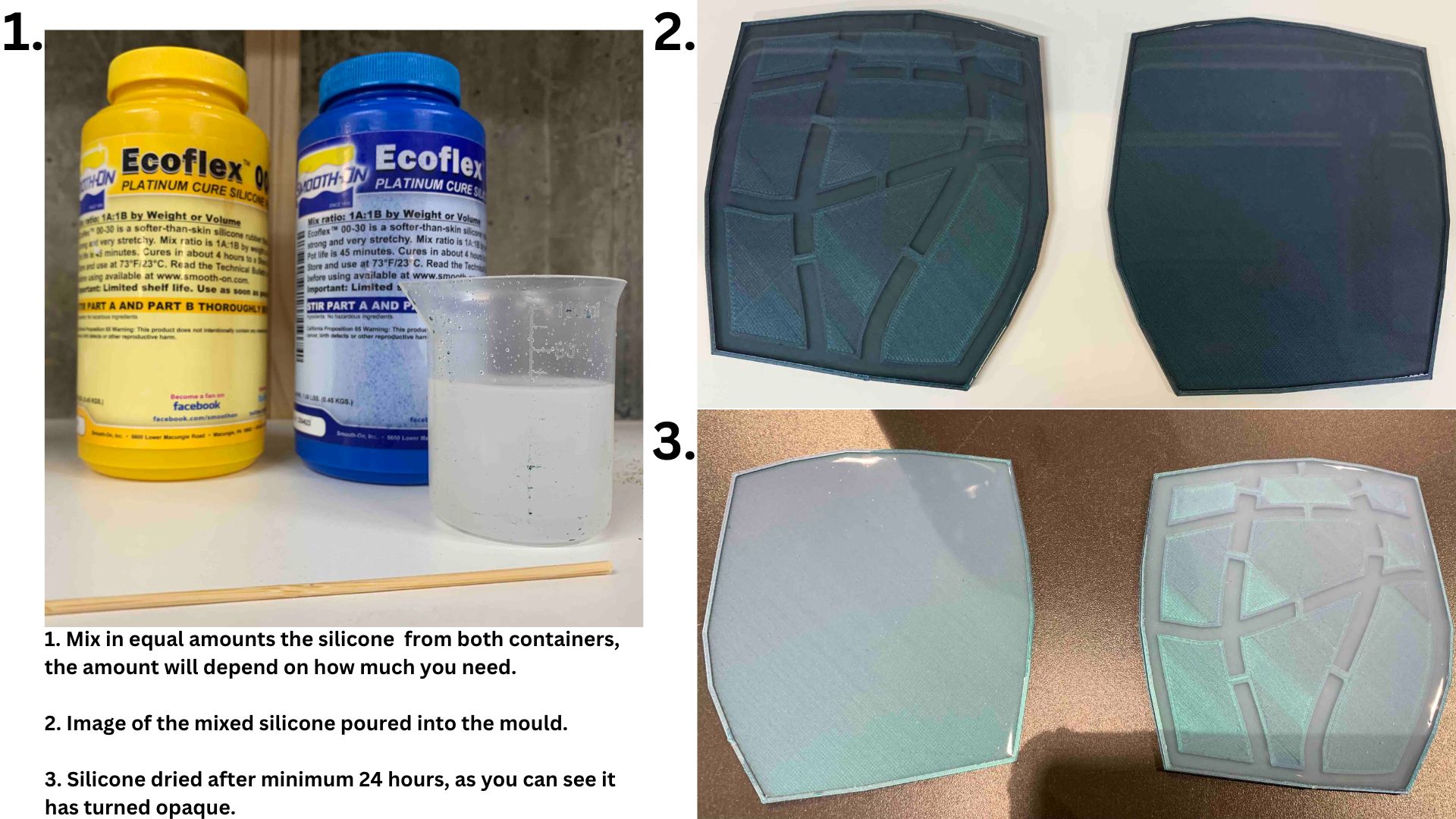
Protoype 2; Silicone¶
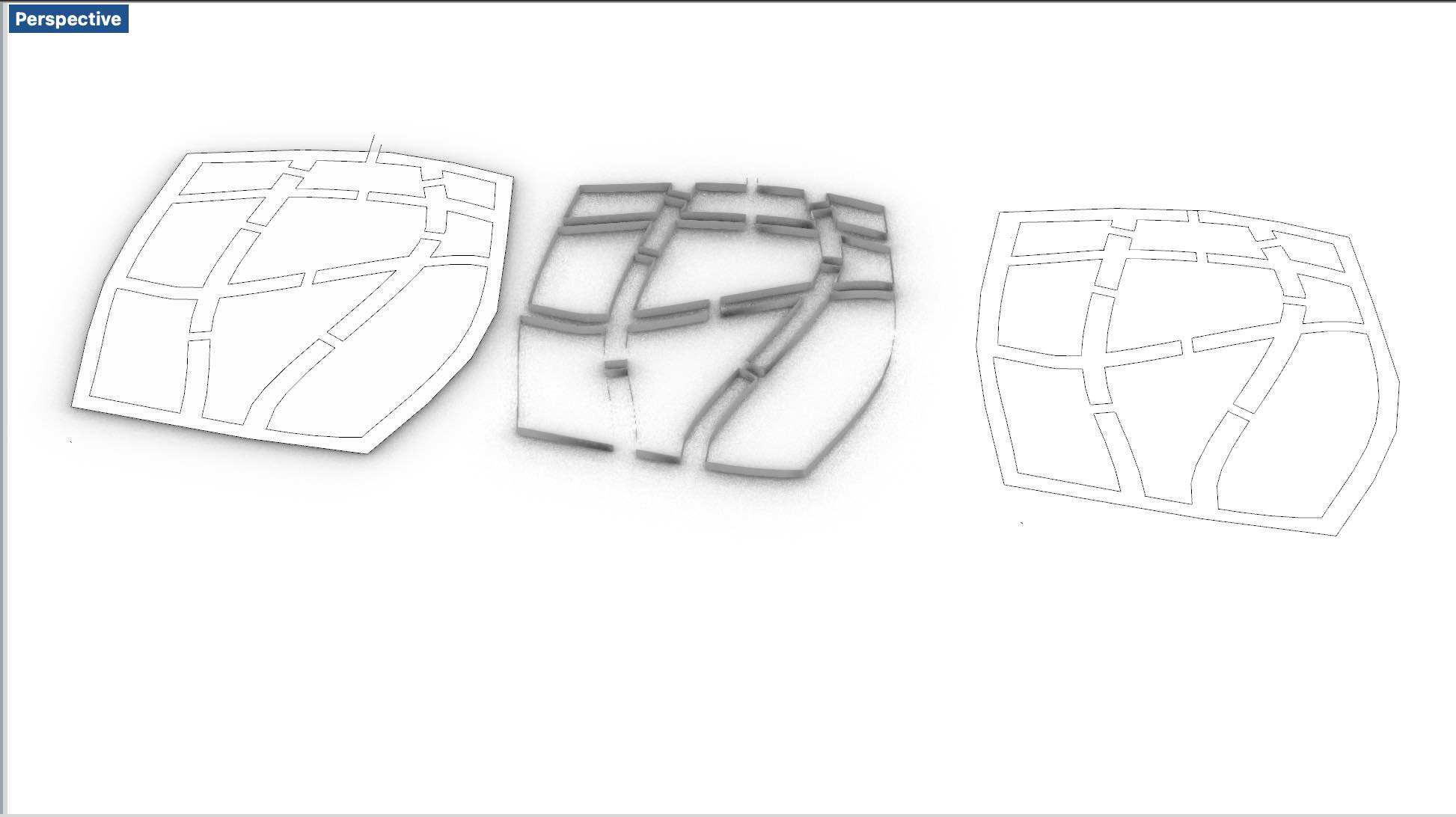
The following model was obtained by modifying the grid used above in Rhino and AutoCAD for obtaining a negative/positive mould.
Rhino process¶
Acura preparation¶
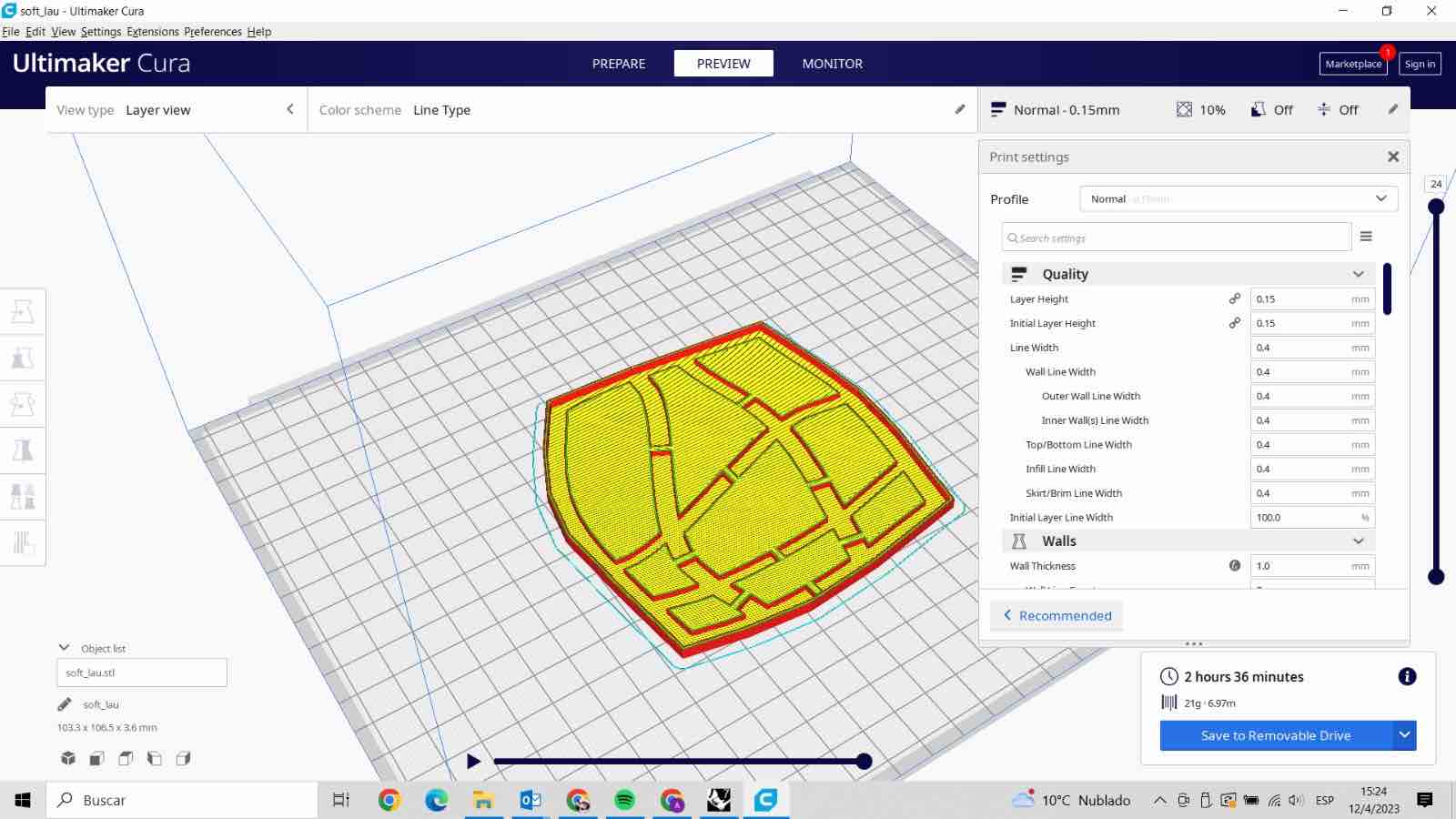
3D Model¶
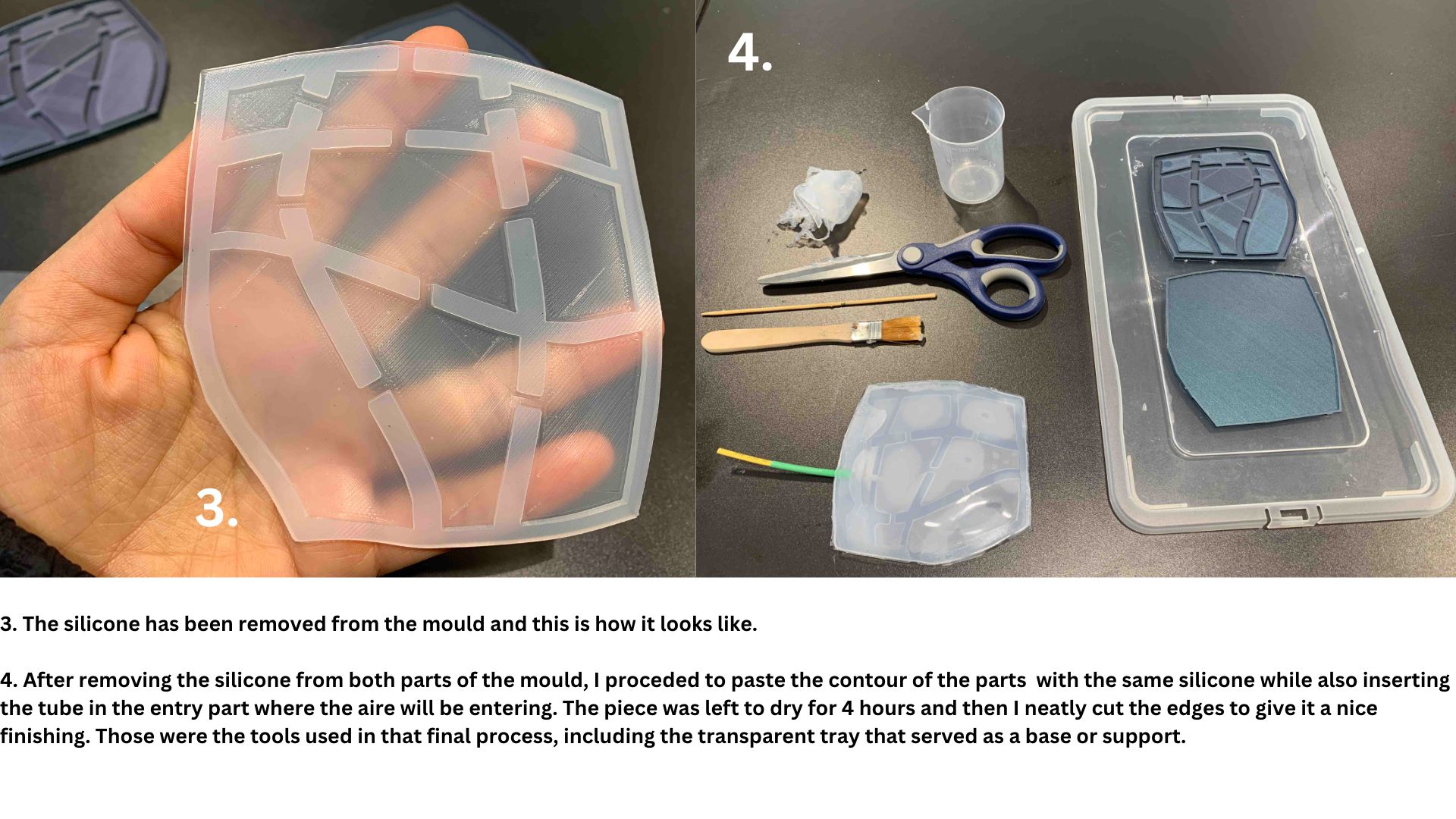
Fabrication¶