12. Soft robotics¶
This week was about discovering soft robotics and it was quite funny to experimente it :)
INSPIRATION¶

- I found very interesting to create sustainable interactive surface like this one. I think it can create a very original way to enlight a room/space. Oriagmi mixes with shapes and shades. Maybe this kind of system could be nice in a discotheque too!
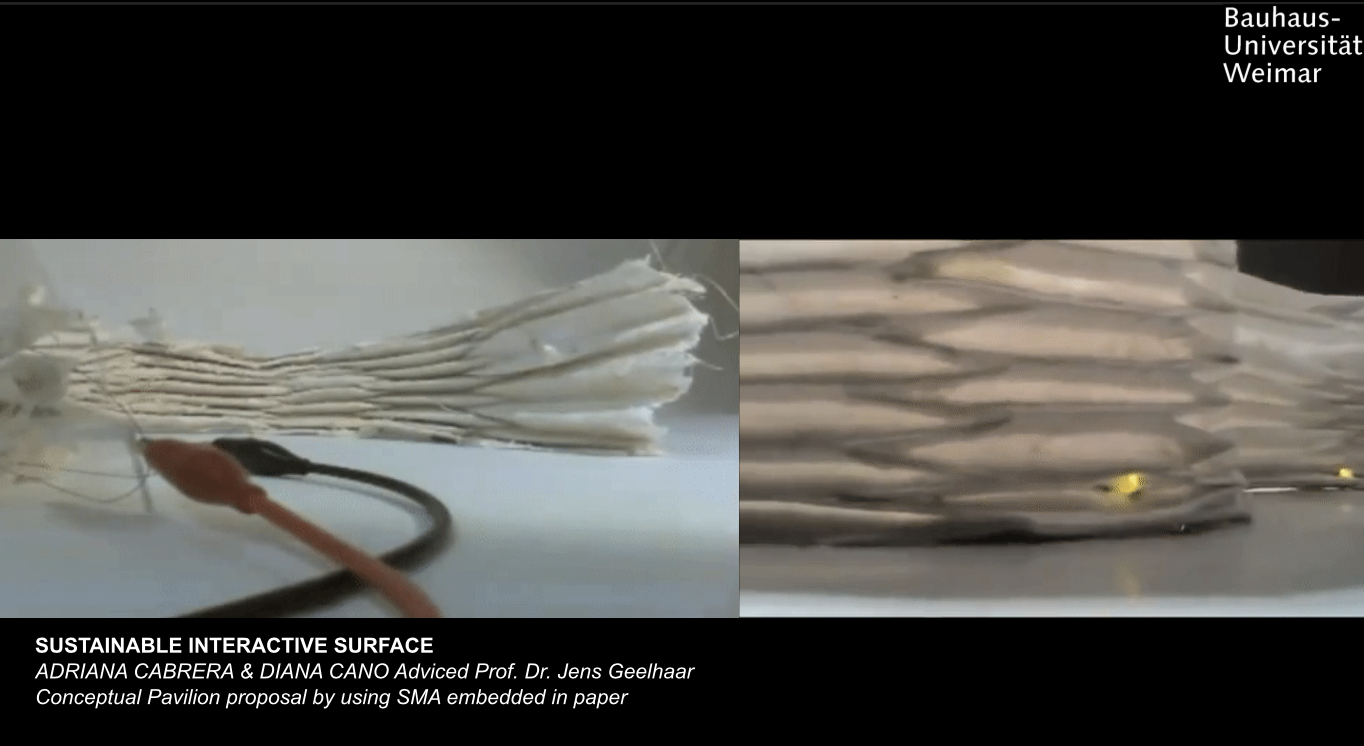
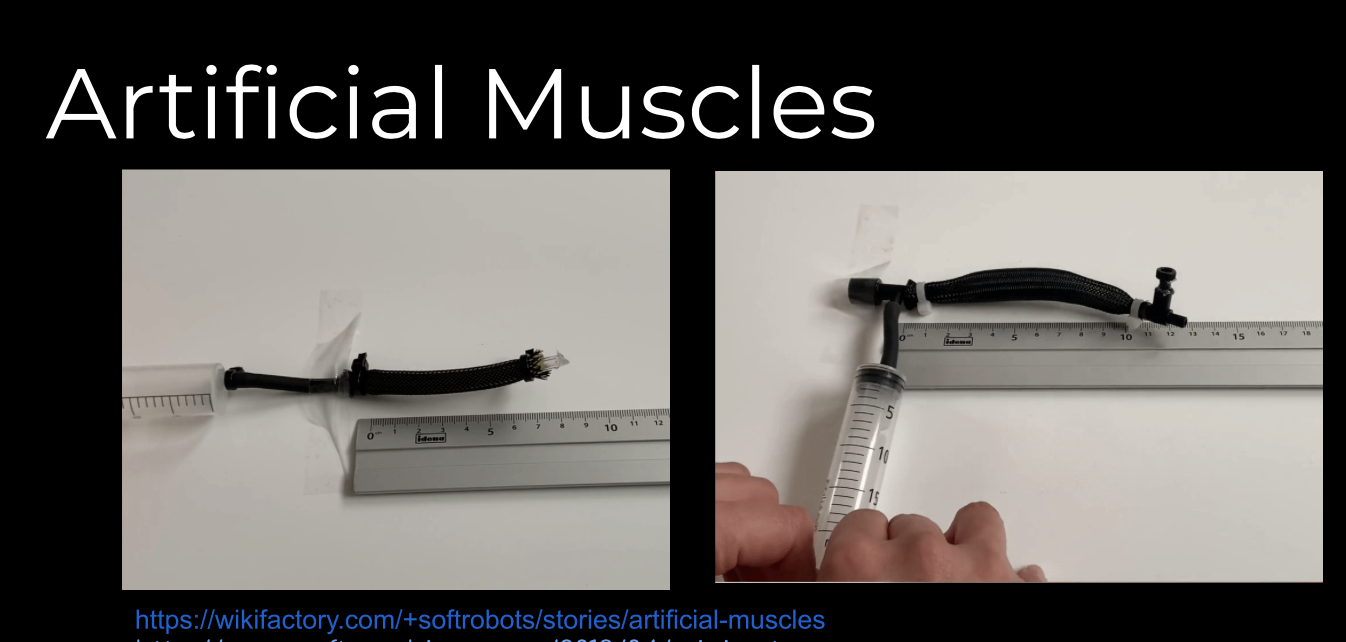
- For medecine research it's great! Hope it can help heal diseases... and create new kind of amputations.
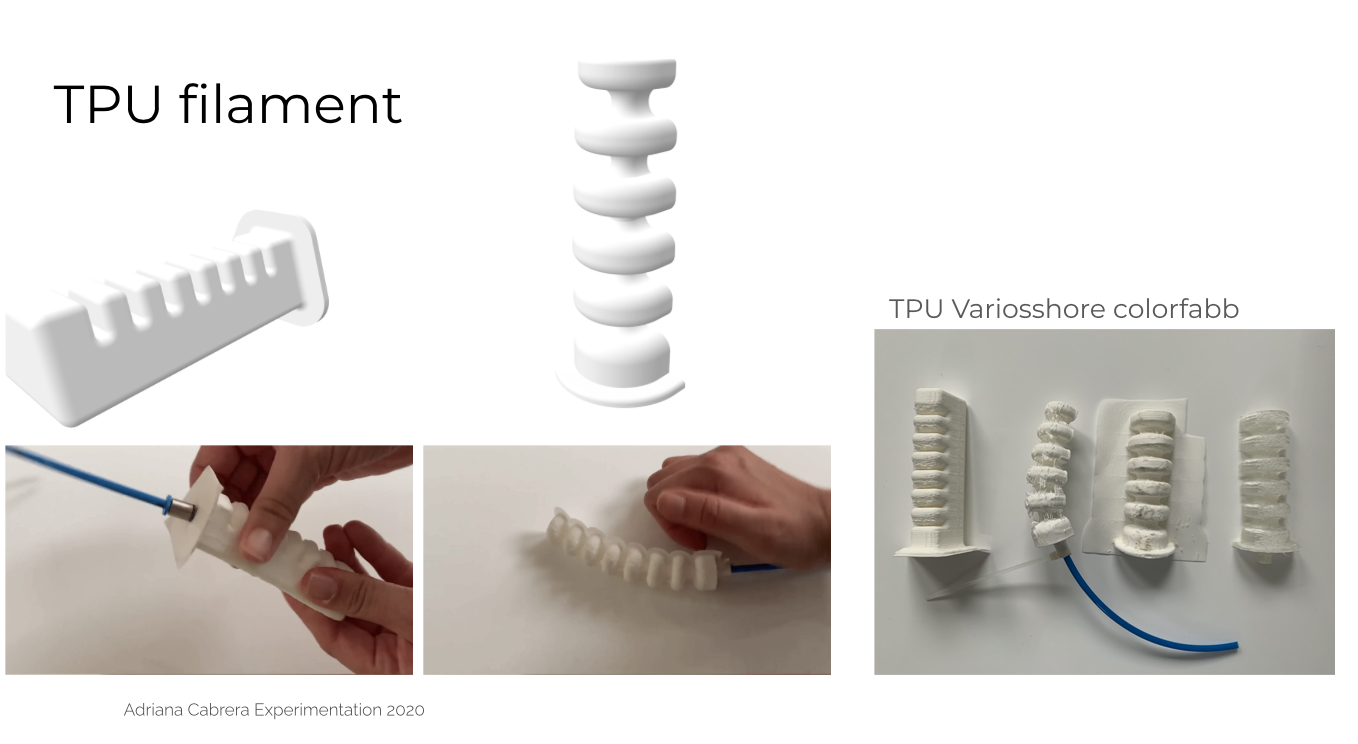
- TPU filament : interesting to create flexibility and avoid breaking ridig objects. Also can be used at the end of a plug socket to avoid mixed threads. And why not try to create flexible tyres ? To have only one kind of tyre for all season and explore ground resistence.
USEFUL LINKS¶
- Tutorials Inflatables by Bruna Goveia
- Software Autodesk Fusion 360
- Soft robotics infos
- Recitation Youyang Song - PeelSphere
EXPERIMENTATION¶
Demo from the class
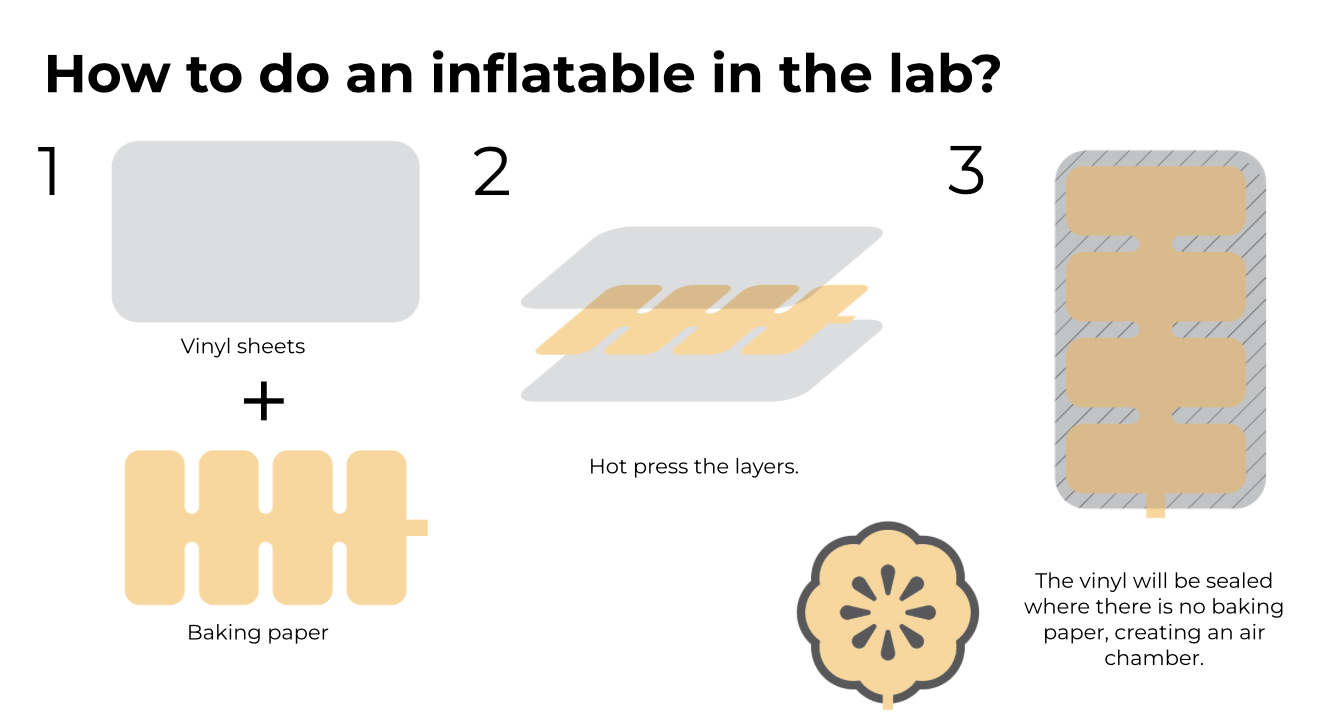
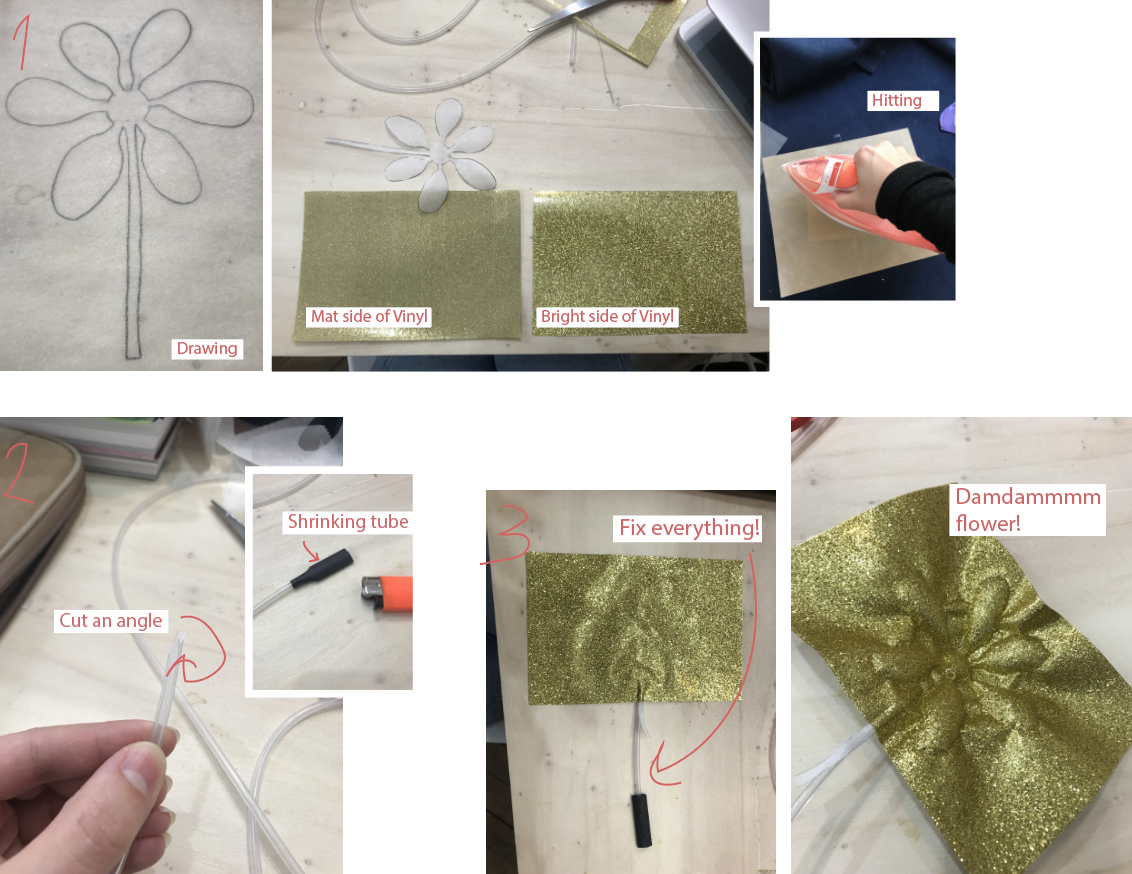
Experimentation with thermo iron vinyl :)
Materials :
-
transparent paper
-
vinyl paper
-
tube
-
skrinking tube
-
iron
-
pump
-
scissors
-
lighter
Steps :
-
draw my flower on a transparent paper then cut it
-
take some vinyl paper (enough big to cover my flower)
-
put the flower between the 2 vinyl paper and hit it (be careful it doesn't burn)
-
cut the angle of the tube and insert it in a skrinking tube
-
enter the tube onto the 2 papers, where the stem of the flower is.
-
with a pump, press to make air and pression.
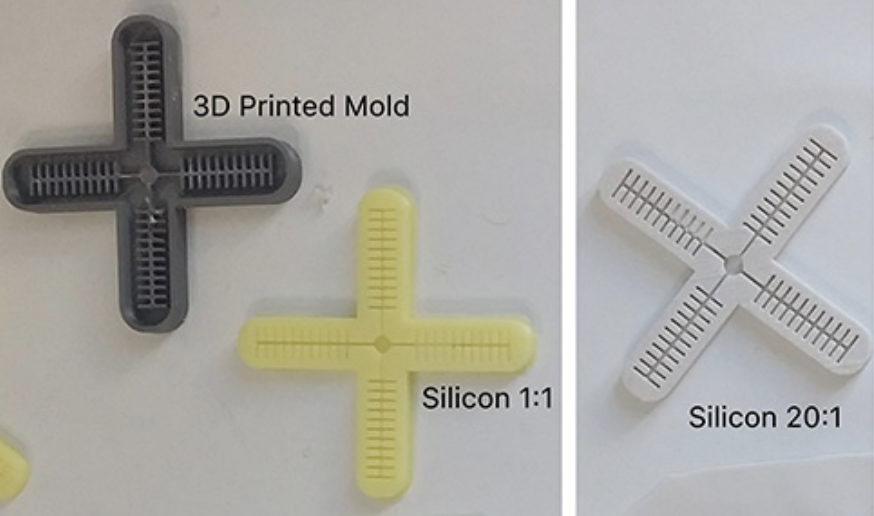
SILICONE MOLDS¶
Materials
-
3D printed mold
-
silicon 1:1
-
silicon 20:1
-
dehydrator
-
Silicon Rubber R PRO 30 from RESCHIMICA
-
platinum catalyst 1:1
-
plastic paper (to put under printed mold)
Steps
-
We used the 3D printed mold from last year Fabricademy to try out the silicon robotics
-
Casting of the silicon (1:1 silicon:activator), one day until dry
-
remove the mold.
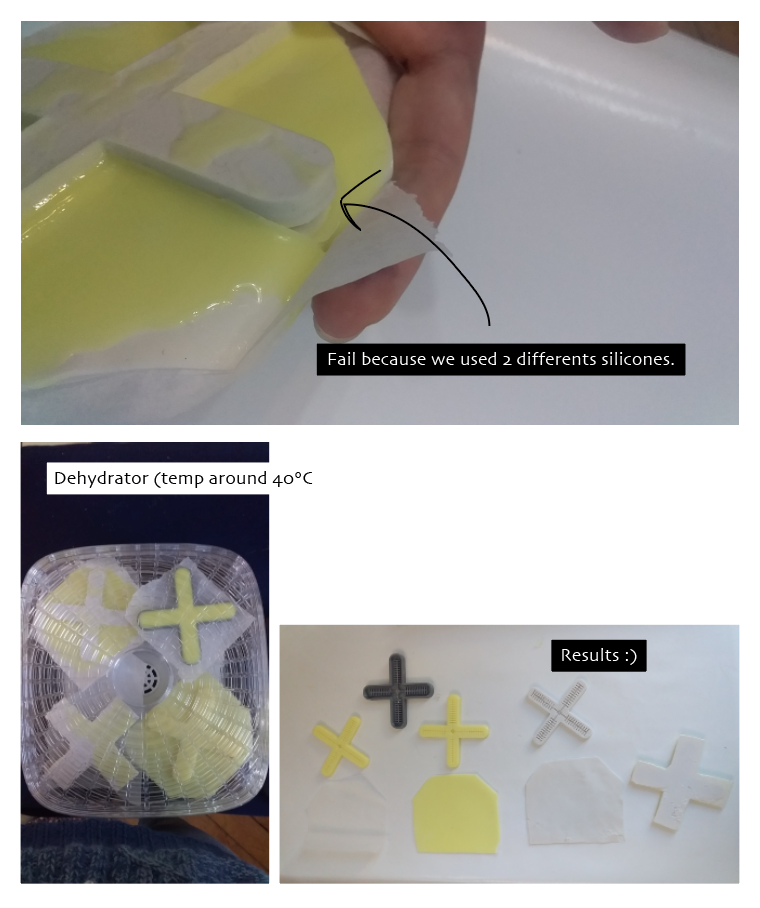
We used Silicon Rubber R PRO30 from RESCHIMICA (for mold making) with base + platinum catalyst 1:1. It was very long to dry so we used our dehydrator (temp around 40°C).
Note : don't mix silicons they won't stick together (see picture).
Testing the grip with an air pump (DC motor) and Arduino
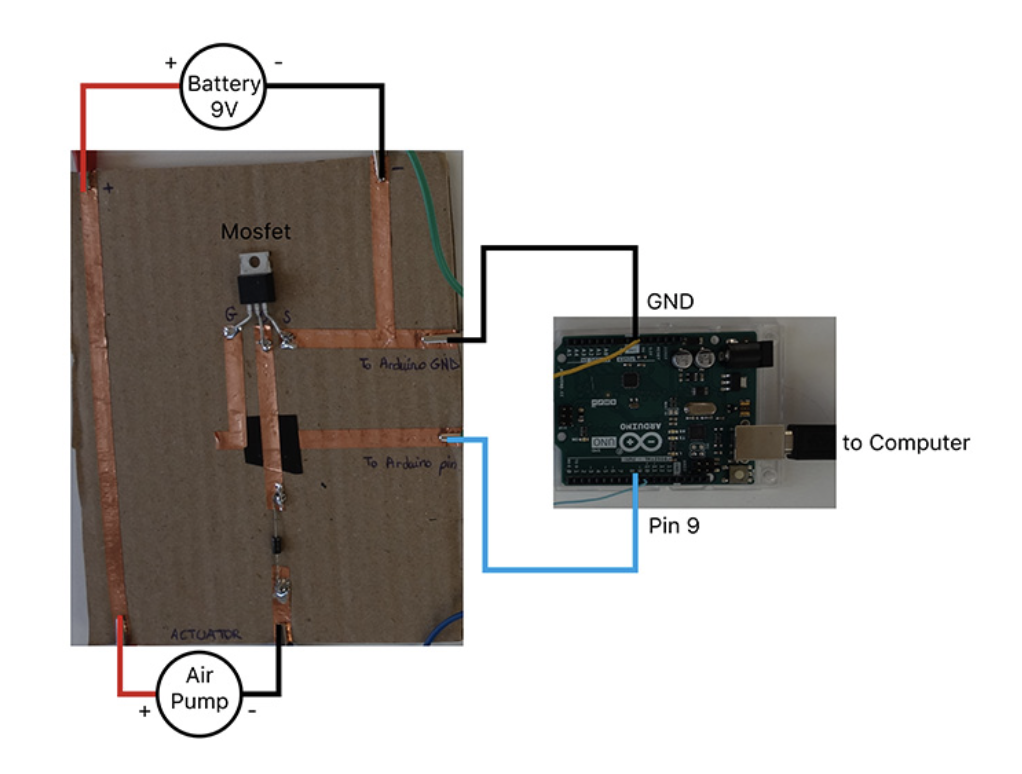
BLINK function
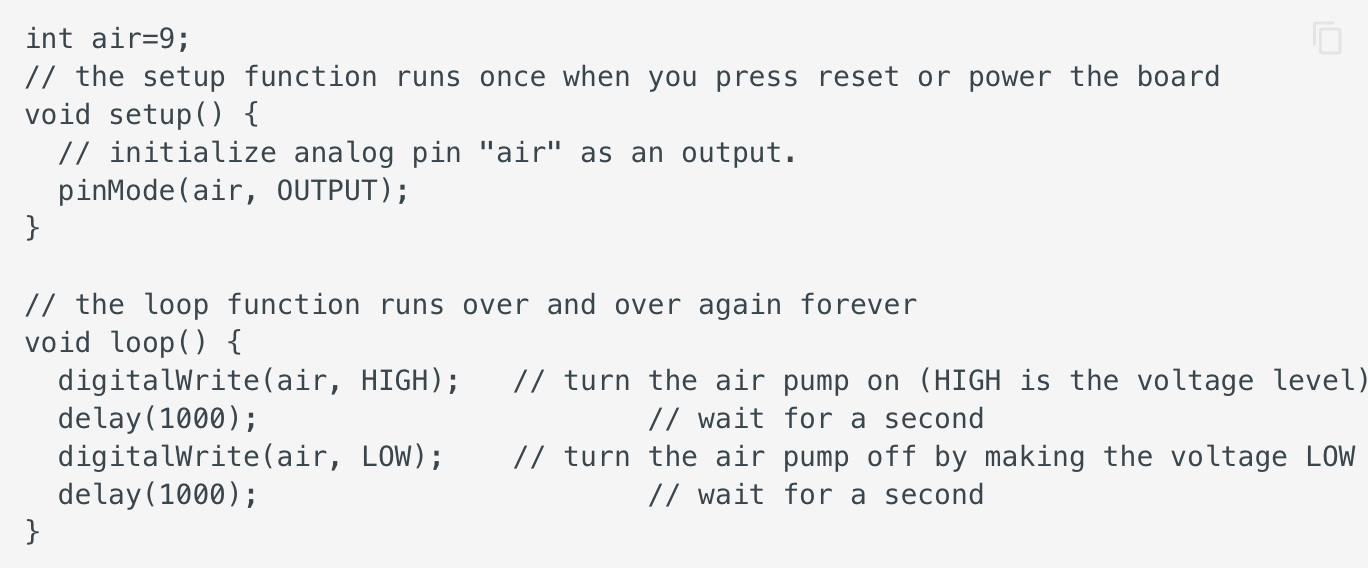
Video from Louise
Results : the chambers didn't work on this one except for the only bubble at the end of one arm. I think the chambers weren't properly closed and maybe the air pump was strong enough.