12. Soft Robotics¶

more in Archigram and Utopian bubble architecture https://hiddenarchitecture.net/cushicle-and-suitaloon/
Week Assignment¶
Weekly Quest
LEACTURES BY CHAMBERS AND ADRIANA CABERA
Check out the weekly assignment here
| Learning Outcomes | Description |
|---|---|
| Research Skills | Acquired knowledge through references and concept development |
| Design Skills | Learned through sketches, 2D and 3D modeling, parametric modeling, and electronic skills, simulation |
| Fabrication Skills | Capable of executing from file to production workflow, molding and casting, vinyl cutting, laser cutting |
| Documentation | Ability to document the process for others to understand and reproduce |
| Final Outcome | Assembling, functioning, and completing the project |
| Originality | Design has been thoroughly thought through and elaborated |
Student Checklist:
- Document the concept, sketches, references, and references to artistic and scientific publications.
- Make a soft robotic sample, develop the pattern for the inflatable, and draw a sketch of the air flow:
- Build a pneumatic wrist brace (basic level) or
- Build a Soft Gripper (intermediate level) or
- Build and document a pneumatic, digitally controlled system, electronics schematic, electronic control, and code (advanced level).
- Design your own version of an inflatable/soft robot.
- Experiment with different materials, such as silicones, 3D printing, parchment paper, thermoadhesive vinyl, TPU fabrics, bioplastic, and document your achievements and unexpected outcomes.
- Make a small video of your inflatable/soft robot working.
- Upload your digital design files (if any).
- Build the electronic circuit to control your inflatable/soft robot (extra credit).
Research & Inspiration¶
my Objective
The objective for this week was to explore various methods of creating space within the realm of soft robotics. I was particularly drawn to the concept of an inflatable tent, envisioning it as a secure space that allows for unrestricted movement, providing a portable "home." My focus was on understanding bending actuation to generate concave shapes and volume. I initiated a series of experiments using vinyl heat press sheets and baking paper to craft my prototype inflatables. Looking ahead, I plan to advance to the laser cutting machine, leveraging its ability to "de-focus" and weld two layers of TPU, enabling the creation of more intricate designs. I'm eager to progress in this direction.
Actuations to explore: contraction in / out put / deflated / inflated / bending / twisting / expanding

my inspiration

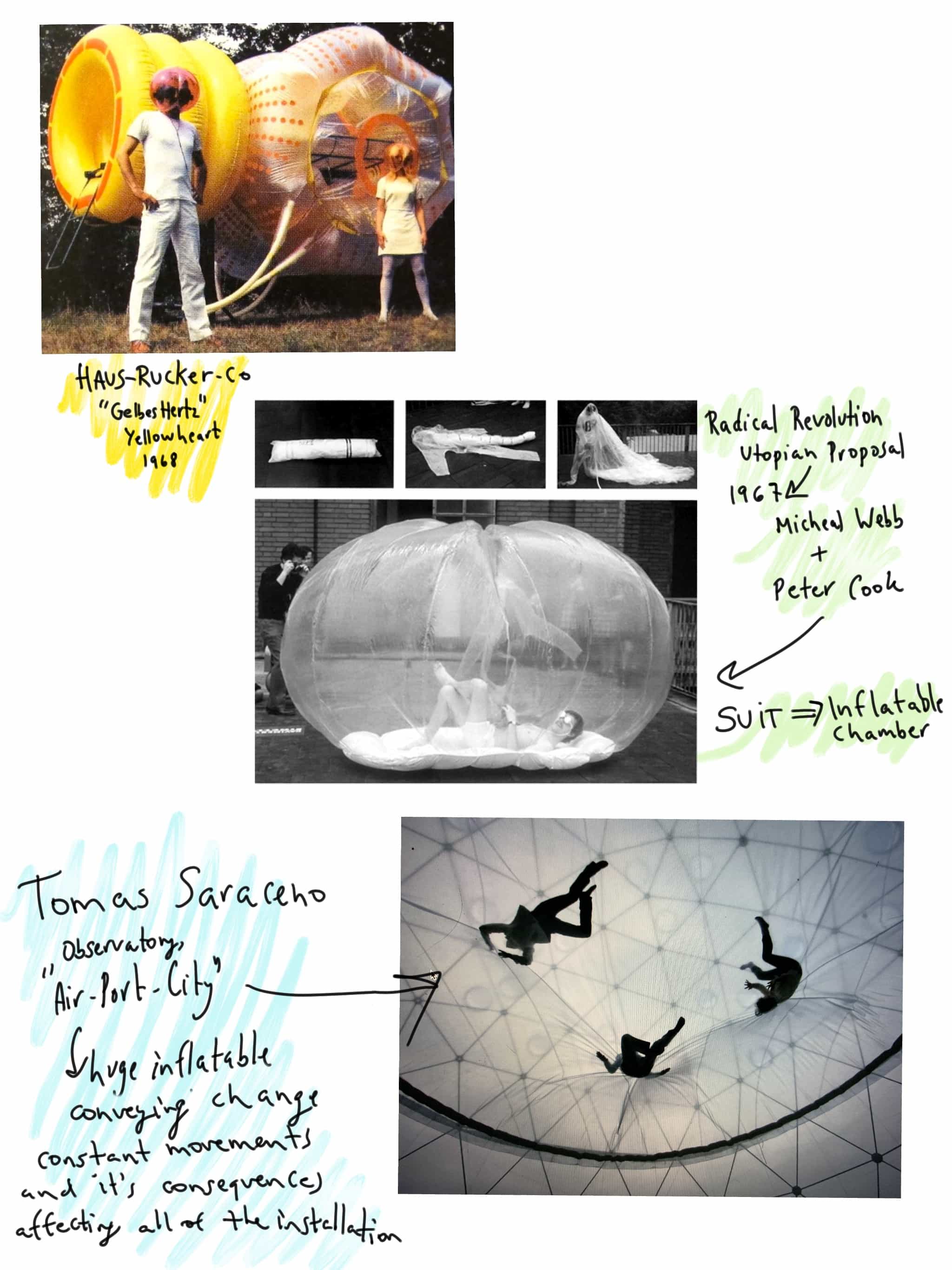
Tomas Saraceno:
"Air-Port-City” (2009), depicting the artist’s vision for an airborne metropolis floating above an earthbound city. Intrigued by the question of national borders, Saraceno has designed an urban setting where residents circumvent geopolitical boundaries, challenging notions of nationhood, land ownership, and borderlines. As the artist has said, “My idea for an Air-Port-City is to create platforms or habitable cells made up of cities that float in the air. These change form and join together like clouds.
This freedom of movement is borrowed from the orderly structure of airports, and it allows for the creation of the first international city. . . . Air-Port-City is like a flying airport; you will be able to legally travel across the world . . . . This structure seeks to challenge today’s political, social, cultural, and military restrictions in an attempt to re-establish new concepts of synergy.”
"The minimal house is the extreme version of a capsule, the radical room." MICHAEL WEBB credits
**INFLATABLE BUBBLES TENT REPAIR **
https://www.winfieldsoutdoors.co.uk/blog/how-to-repair-inflatable-tent-tubes/
students examples
Saskia Halinska Final Project UNFLATABLES (2021/22) Folllow the link to exlore all the differents forms and reactions depending on the design which she is investigating during the project. [Inflatable Final Project] (https://class.textile-academy.org/2022/saskia-helinska/finalproject.html)
https://class.textile-academy.org/2024/julija-karas/assignments/week09/
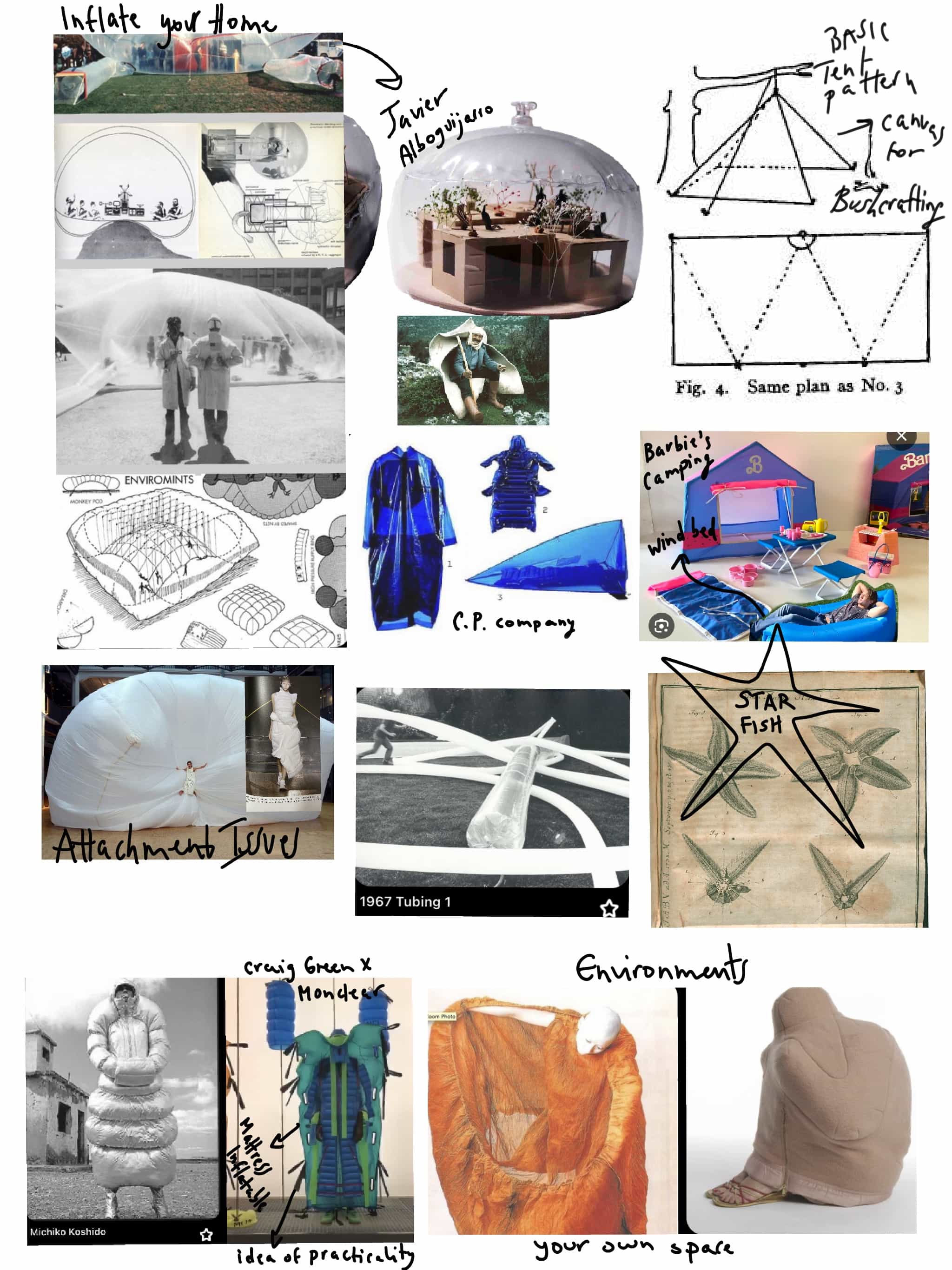
Javier Alboguijarro (GOOD USE OF MATERIALS AND MANY IDEAS FOR INFLATABLES) [CLICK HERE FOR MORE] (https://class.textile-academy.org/2022/saskia-helinska/finalproject.html)
Julia Karas (GOOD USE OF MATERIALS AND MANY IDEAS FOR INFLATABLES) [CLICK HERE FOR MORE] (https://class.textile-academy.org/2024/julija-karas/assignments/week09/)
Notes¶
Soft Robotics 101
Soft Robots: Soft Actuation: Soft robots use systems that are compliant and flexible for actuation. This means they employ materials and mechanisms that allow for deformations and flexibility, in contrast to traditional rigid robotic systems.
What is "Soft"?: In the context of soft robots, "soft" refers to the pliability, flexibility, and compliance of materials and structures. Soft materials, such as elastomers and flexible polymers, enable robots to deform, stretch, and adapt to their environment.
What is "Robotics"?: Robotics is a multidisciplinary field that involves the design, construction, operation, and use of robots. Robots are programmable machines capable of carrying out tasks autonomously or semi-autonomously. Robotics encompasses various aspects, including mechanical design, electronics, computer programming, and artificial intelligence. In the context of soft robotics, the focus is on creating robots with compliant and deformable structures.
Types of Actuations:
| Type | Description |
|---|---|
| Soft Robots | Systems that are compliant and flexible. Have a feedback sensory and control system |
| Soft Actuators | Systems that are compliant and flexible. Used for shape changes, joining, and locomotion |
| Fluidic | Actuated by fluids |
| Biological | Mimicking biological movements or structures |
| Thermal | Actuated by temperature changes |
| Chemical | Responsive to chemical stimuli |
| Magnetic | Actuated by magnetic fields |
| Hybrid | Combination of different actuation principles |
notes from: emma-picanyol
BIOMIMETICS
Biomimetics, or biomimicry, is a multidisciplinary field focused on studying and emulating natural biological systems to solve human challenges and design innovative technologies. It involves drawing inspiration from the structures, processes, and functions evolved in living organisms over time. Biomimetics spans various fields, including materials science, robotics, medicine, and architecture. The goal is to create sustainable and efficient solutions by mimicking the efficiency, resilience, and adaptability found in nature. Examples include Velcro inspired by burrs and streamlined vehicles based on fish hydrodynamics. The ultimate aim is to develop technologies that harmonize with the environment.
(Mimiking things from nature: exampple grass and vine clibmers amazing example in nature)
VOCABULARY
- Bend
- Stretch
- Expand
- Rotate
- Shrink
- Float
- Roll
- Fall
- Rebound
Nature and Technology
Robot ---> Natural System Artificial Muscles ---> Natural Muscles
Actuation in Nature examples:
- open and close petals in response to light and heat
- hydrospopic
- high moisture and low moisture
- hinge mechanism
TYPES OF STIMULI OF SOFT ACTUATORS:
| ACTUATORS | Description |
|---|---|
| Fluidic | Responsive to fluid flow |
| Chemical | Responsive to chemicals |
| Biological | Mimicking biological systems |
| Thermal | Responsive to temperature |
| Electric | Responsive to electrical signals |
| Magnetic | Responsive to magnetic fields |
| Hybrid Systems | Combination of multiple stimuli |
How does inflatable dome work?
Air blowers continuously pump air into the structure, maintaining the proper air pressure to keep the dome inflated and structurally sound. Cooling or heating HVAC units can also be used to adjust air temperature. Air-lock doors maintain pressure while handling pedestrian traffic.
- bio-inspired octopus robot by J.Fras, Y. Noh,....
- bubble CASTING
- CREATING BUBBLES, TRAPPING AIR, MORPHING SHAPES
- FLUID ACTUATED
- pneubotics
- CHECK THIS OUT: THERMOPLASTIC ELASTOMER TPE stacked balloon actuators
WHERE AND WHY SHOULD WE USE IT??
-
Unstruction Enviroments ! (eg: Otherlab pneubotics)
-
FOAM (fluid-drivien origami-inspired artificial muscles)
-
(eg: Wyss Institute, harvard SEAS MIT CSAIL)
-
IS SUBSTRACTION ALSO IS AN IDEA OF "INFLATING"
-
LIGHT-WEIGHT SKELETON AND MORE HEARVIER "SKIN" --> MIMICKING NATURE BIRDS FOR EXAMPLE
-
BIO-DESIGN
-
ROOTS IN ART AND ARCHITECTURE
-
FURL - SOFT PNEUMATIC PAVILLION (kinetic deisgn responsive to the space)
-
APOSEMA - SOFT ROBOTIC MASK (emotions read)
Design Patterns: (adriana cabrera)
- stripy
- curling
- twisintg
- square
- double folding...
(eg: soft skeleton Elehphant project)
(eg: Julie Taris inflatable hood laser sealed fabriacademy 2017)
(eg: Saskia Helinska fabriacademy 2021)
INFLATABLES (BIG SCALE)
MIT printflatables- tangible media TECHNIQUE:
Honeycomb structure gel inside
SOFT ROBOTICS 101
Textile Futures Bradley Quinn EXOSKELETONS
Fluid Actuators¶
Key Features and Concepts:
Fluid actuators in the field of soft robotics are devices that utilize the principles of fluid mechanics to generate motion or force. Unlike traditional rigid actuators, fluid actuators are designed to be compliant, flexible, and deformable. These actuators are often composed of soft materials, allowing them to mimic the flexibility and adaptability found in natural organisms.
Intro:
Fluid actuators are typically made of soft materials such as elastomers or flexible polymers. This design enables them to deform and adapt to their surroundings.
Working Principle:
These actuators operate based on the manipulation of fluids, often air or liquid. Changes in fluid pressure or flow induce deformations in the soft structure, resulting in movement or force generation.
Types of FLUID Actuators:
- Pneumatic Actuators: Use compressed air to drive motion.
- Hydraulic Actuators: Utilize liquids, usually oil, for generating movement.
- Bio-Hybrid Systems: Combine biological components with fluidic elements for enhanced functionality.
Applications:
Soft Robotics: Fluid actuators play a vital role in the emerging field of soft robotics, where their compliance is advantageous for tasks in unstructured environments.
Biomedical Devices: The flexibility of fluid actuators makes them suitable for applications in medical devices, such as soft grippers for delicate object manipulation.
Chemical Actuators¶
contraction in / out put / deflated - inflated
Chemical actuators in the field of soft robotics are devices that undergo shape changes or movement in response to chemical stimuli. Unlike traditional mechanical actuators, which rely on physical forces or electricity, chemical actuators respond to specific chemical signals. These actuators often utilize materials that undergo reversible chemical reactions, leading to changes in their properties and resulting in controlled movements.
Principle of Operation: Chemical actuators operate based on the principles of chemical reactions. When exposed to certain chemicals or environmental conditions, these actuators undergo transformations that cause them to change shape, expand, contract, or exhibit other controlled movements.
Material Selection: Soft robotic systems employing chemical actuators often use smart materials, such as hydrogels or polymers, that are responsive to changes in pH, temperature, or the presence of specific chemicals.
Applications: Chemical actuators find applications in various soft robotic systems, including drug delivery devices, biomedical implants, and environmental sensors. Their ability to respond to specific chemical cues makes them suitable for tasks where precise control and adaptability are essential.
Flexibility and Adaptability: Soft robotics, including chemical actuators, are known for their flexibility and adaptability to complex environments. This makes them suitable for tasks that traditional rigid robotics may struggle with.
REFERENCES:
- Electroactive Actuators EAP:
- (eg: UC San Diego - Jacobs school of engineering)
Magnetic Actuators¶
- Field activated electroiactive polymers
- mckibben muscles
- weaving knitting tunable force and strain
- active textile made of thin mckibben muscles tubing think artifical muscles tube diy
- materials : cellulose "paper" actuation nd drying
Magnetic actuators in the realm of soft robotics are devices that generate controlled movements or deformations in response to magnetic fields. Unlike traditional mechanical actuators, which rely on direct physical contact, magnetic actuators exploit the interaction between magnetic fields and materials with magnetic properties. This approach allows for wireless and contactless manipulation of soft robotic components.
Working Principle: Magnetic actuators operate based on the principles of magnetism. When exposed to an external magnetic field, materials with magnetic properties within the soft robotic system experience forces that induce movement, deformation, or changes in shape.
Material Selection: Soft robotic systems using magnetic actuators often incorporate ferrous or magnetically responsive materials, such as ferrogels or magnetic elastomers. These materials can undergo reversible deformations in the presence of magnetic fields.
Applications: Magnetic actuators find applications in various soft robotic designs, including medical devices, minimally invasive surgery tools, and targeted drug delivery systems. Their ability to operate without direct physical contact makes them suitable for applications where precision and non-intrusiveness are crucial.
Wireless Control: One of the significant advantages of magnetic actuators is their wireless and remote controllability. By manipulating the strength and direction of the magnetic field, operators can precisely control the movement of soft robotic components.
Soft and Flexible Design: Soft robotics, including magnetic actuators, are known for their compliant and flexible structures. This allows for adaptability to complex environments, making them suitable for tasks where traditional rigid robotics may be impractical.
Equipment
MATERIALS WE CAN USE:
- fabrics
- paper/cardboard
- TPU/TPE foile
- TPU filament
- Silicon Rubbers
- Gelatin
- HEAT PRESS
- LASER CUTTER
- VINYL
- TRASH BAGS
- MOLDS
- SILICON
- GELATIN BIOBASED MATERIAL
Workflow & Experiments¶
Thermovinyl + Heat Press Inflatables
Bending Actuation with Vinyl
Explosion Actuation
Materials: Heat press vinyl, baking papeer, scissors, PTU, straws, air compressor, inflation pump, silicone, gelatine, moulds
The initial focus was on bending actuation as a key technique. Utilizing a heat press, we experimented with vinyl as the primary material. The method involved using baking paper to draw and cut our design, placing it between two vinyl layers. However, we encountered challenges with the material's durability, resulting in holes upon application of pressure. A crucial lesson emerged: leaving only one film on the two vinyl layers significantly improved the material's integrity.
Looking at Durability and Strength
This part of my experiment showed me how important it is for inflatable structures to be tough. They need to handle weight, different weather conditions, and just be sturdy overall. Understanding these things will help figure out how these inflatable structures can be used in real life. This experiment taught me a lot about how materials work and how important it is for things to be strong and reliable.
Thermovinyl Inflatables: Step-by-Step¶
Materials:
Materials: Heat press vinyl, baking papeer, scissors, PTU, straws, air compressor, inflation pump, silicone, gelatine, moulds
_ 1 Make design on baking paper (ensure you leave a blow opening) and create vinyl outer design
_ 2 Place baking paper design inbetween vinyl (both shiny sidees facing out and matt sides in) + wrap in baking paper
_ 3 Put in heat press (140 degrees C for 15 seconds)
_ 4 Take out + peel off plastic protective layer carefully + ready to inflate!
(credits Stephanie Johnson) https://class.textile-academy.org/2024/stephanie-johnson/assignments/week09/
Hints and pointers
- Add a little nugget to the outside to help you insert a straw or tube later to "actuate" the inflatable
- Welding lines should be about 5x5 mm at least so make sure to give a 5mm outside margin, and don't make the welding shapes too small. the shiny sides of the vinyl should be on the outsides, the matte side facing in.
- The baking paper is sandwiched between.
- Laser cut the baking paper, or TPU if you want
- Do not lasercut the thermovinyl! (releases chlorine)
- Put this sandwich between two sheets of baking paper and heatpress until the the two sides are welded together. This goes pretty fast, take care not to burn it 140 degrees Celcius is a good start.
- Peel off one or both sides (suggest only one) of the rigid plastic (it will have different results!)
credits (tips suggested loes bogers research)
(https://class.textile-academy.org/2020/loes.bogers/assignments/week12/)
Laser Welding
Material used: TPU
Laser Settings for Welding: Speed: 95 Power Max: 30 Power Min: 10
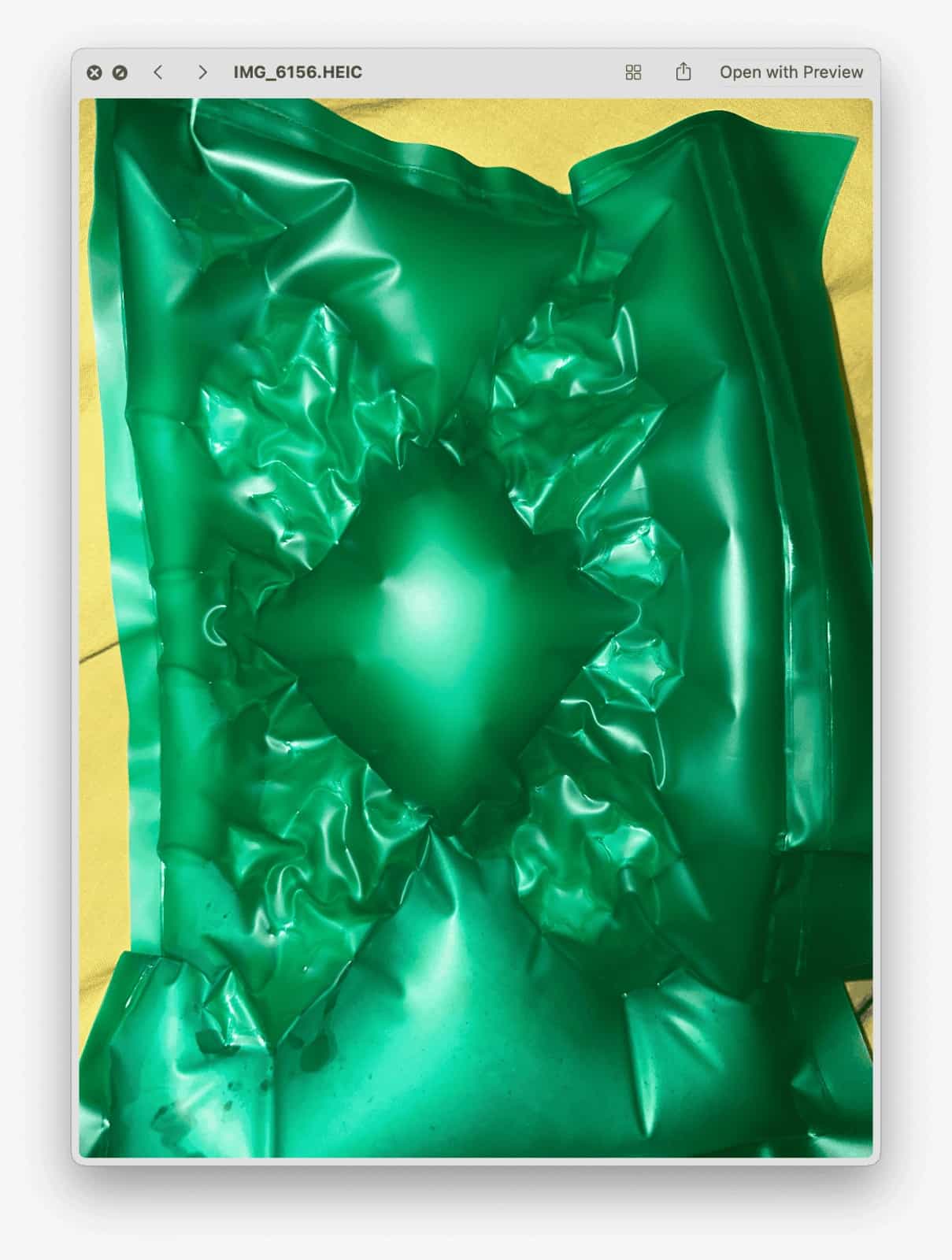
In my opinion, the most successful experiment involved the star design, TPU material and laser welding. Unfourtunaly they two versions I did both had some issues: the first one was a very close and tight design and air couldn't move properly, whilst the second was itirated and imporved but i was so excited that i tried the air compressor to give it a nice pump and it exploded....
CUT LINE
100 - Speed 35 - Power Max 10 - Power Min
WELD LINE
80 - Speed 40 - Power Max 10 - Power Min
OR
95 - Speed 30 - Power Max 10 - Power Min
Use all the jigs (38 mm) to unfocus laser
(credits Stephanie Johnson) https://class.textile-academy.org/2024/stephanie-johnson/assignments/week09/
[Javier Alboguijarro] (https://class.textile-academy.org/2022/saskia-helinska/finalproject.html)



Silicon Molds
We used the PLA mold for the gripping actuator we found at the FabLab that belonged to Samson, a Fab Academy student from the previous year. Looking at his documentation, he used this model to print the mold.
We printed the PLA mold for the bending actuator that was made Fabricademy 2022 by Saskia Helinska.
^this is for the source files of molds we used in silicone and gelatine casting.
(credits notes Asli)
Reflections¶
Reflection
Upcycling Plastics
I tried to reuse plastic packaging by melting different materials, including items from our class. It was tough at first, especially with regular trash bags, teaching me how crucial it is to choose the right materials for the job.
Inspired by Javier's research, I will want to experiment with biodegradable trash bags in the future. These are known to work well with laser cut machines. You can learn more here.
Aspiring for the Future - Bioplastics and Beyond
Looking forward, my focus shifts to future aspirations. I dream of using bioplastics to create an inflatable home, demonstrating the potential for sustainable and eco-friendly applications in soft robotics. This step goes beyond experimentation, aiming for tangible and impactful outcomes.
Tips
TIPS:
TPU IS QUITE A DELICATE MATERIAL TIP NEVER USE A COMPRESSOR MACHINE FOR BLOWING AIR.. IT EXPLODES...
VYNILE HEAT PRESS TIP KEEP ONE LAYER OF THE CLEAR (RIGID) PLASTIC FOR BETTER DURABILITY
PLASTIC TRASH BAGS DIDN'T WORK.. HAVE TO STILL TRY "BIODEGRADABLE" SUPERMARKET TRASH BAGS...JAVIER TESTED THEM IN SPAIN AND WORKED...LET'S HOPE IN AMSTERDA IT'S THE SAME.
Another critical aspect surfaced during experimentation the durability and tenacity of the inflatable structures. The need for these structures to withstand factors such as body weight, environmental conditions (water, wind, humidity), and overall robustness became evident. Failures in this phase underscored the necessity of considering these factors for practical applications of inflatable structures.
Results¶
Favorite Outcome
UPCYCLING INFLATABLES ---> HEAD PIECE




Tools¶
Files






Hacks
-
center images and text:
-
mp4 in loop:
(((
(.
)))
HYPERLIKNG IN A SENTENCE:
((( Check out the weekly assignment [here] (http://fabricademy.fabcloud.io/handbook/assessment/criteria/#12-soft-robotics) )))
Future References¶
Dig Deeper
Inspired by the ecological philosophy of Félix Guattari and the visionary thinking of architects and theorists such as Buckminster Fuller, Peter Cook, and Yona Friedman (tomas saraceno)
Future Directions: HOW TO BLOW YOUR INFLATABLE? Exploring Inflation Methods for Eco-Friendly Soft Robotics
BRANCHIE Concept :
FACEBOOK 2013: Ooh I just had idea for the Bio-Engineering page - how about a biological gills-to-respirator ?device? Where it would filter O2 from the water so you could breathe it... Or even a non-biological gills-to-lungs machine. That'd probably be a nice step towards underwater bio-domes (self sustaining ecosystems). I'd think most any Seastead that gets going would have at least some underwater sections to it, and completely underwater Seasteads could be a huge part of our near future
Manual Inflation:
Exploring the feasibility of manual inflation methods ensures simplicity and accessibility. This approach aligns with the goal of creating portable and user-friendly inflatable structures. Techniques such as hand-pumping or manual compression may be investigated for their practicality.
Mechanical Inflation:
Incorporating mechanical systems for inflation introduces a layer of automation. This could involve designing mechanisms that can be operated by hand or by a mechanical device, providing a balance between user control and efficiency.
Electrical Inflation:
The use of electrical systems, including small fans or blowers, opens up possibilities for rapid and controlled inflation. However, the challenge lies in balancing the energy consumption to maintain eco-friendliness. Exploring energy-efficient components and technologies will be crucial
Solar-Powered Inflation:
Embracing solar panel energy for inflation aligns with the commitment to sustainability. Integrating solar-powered systems not only reduces the environmental impact but also enhances the autonomy of the inflatable structures, making them suitable for various settings.
Hacking Existing Objects:
A creative approach involves repurposing and hacking existing objects for inflation. Consideration is given to objects like leaf blowers, hair dryers, small fans, or fish tank air blowers. This method not only reduces the need for new components but also taps into readily available resources
Environmental Considerations:
Each method of inflation will be evaluated against environmental criteria, including energy efficiency, recyclability of components, and overall ecological impact. The goal is to minimize the carbon footprint throughout the lifecycle of the inflatable structures.
Integration of Solar Energy:
Incorporating solar panels to harness renewable energy for the inflation process. This not only aligns with sustainability goals but also enhances the versatility of the inflatables, making them suitable for off-grid or outdoor scenarios.
© [2023] credit : ray