12. Soft robotics¶
Definition and examples¶
Lily Chambers & Adriena Cabrera are presenting us the world of Soft Robotics !
Soft robotics belongs to the Robotic field : robots are constructed with soft materials, and have a soft and smooth action.
Through them, we are looking for slow and accurate motion, like for medical uses.
They imitate natural systems like those of flowers, plants etc but as well human muscles, in expending and contracting themselves.
Just note that artificial muscles allow contraction, expansion and rotation, whereas natural muscles can only contract.
Here are some examples of how Nature express its ability to contract and expand, just for the pleasure of beauty!
Pine cone :
Mouvements of a jellyfish :
A nymphea :
To me, I would say that Soft Robotics is the feminin aspect of robotics, bringing delicacy, lightness and softness in a very "metallic universe" which belongs usually to robots. And that's soooo cool !!!
Actuators¶
What are the different ways to make your robot alive ?
What are the different stimuli possible ?
It can be driven by various fluids, but in fact the one common thing is that it has to be soft !!!
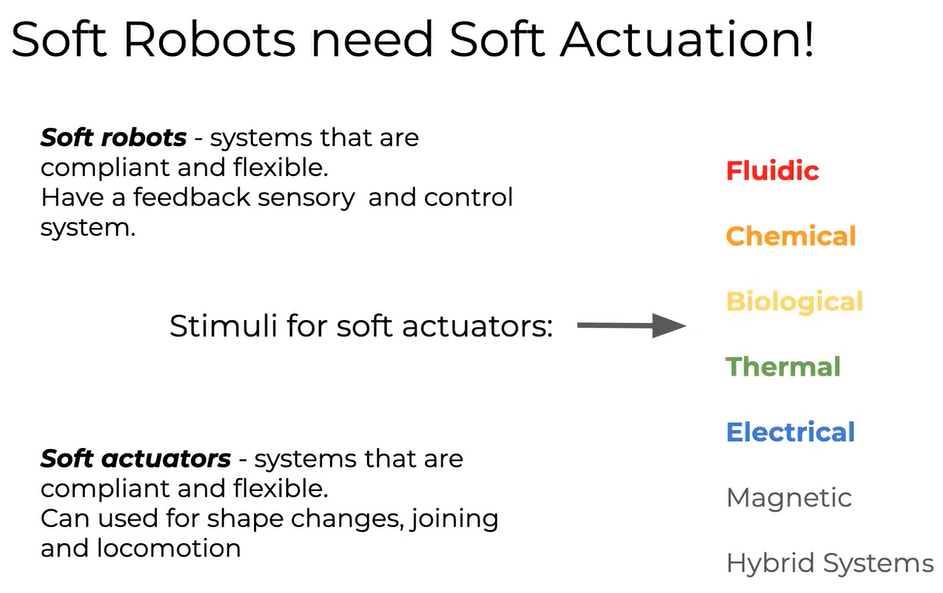
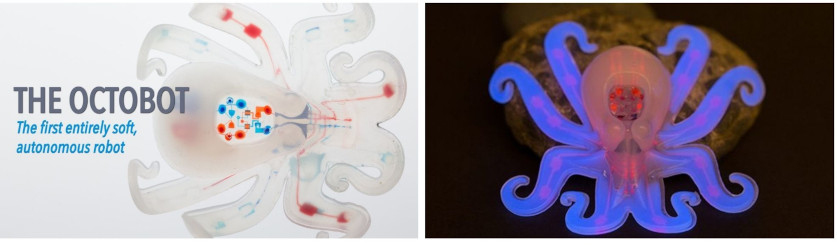
- Chemically actuated : like in the project "Octobot", in which the gas flows through the chambers, inflating and flexing the octobot's arms four at a time !!!
- FLUID ACTUATED, Using sillicone and molds
EX Pneumatics PneuNets
-
Thermal actuation : muscles are reproduced with twisted nylon thread, which contracts when heated.
-
Electroactive Actuators, EAP, ElectrActive Polymers. The voltage needed and the thickness of the material are inverse-stimulated : the thiner material, the lower the voltage
-
FOAM : Fluid-driven Origami-inspired Artificial Muscles
- Robotic Exoskeleton Applications, like the"Inflatable Soft Robotic Hand"
You can follow this tuto to make it at home :
- Biologically actuated - Active Fluids : Micromotors are powered by microbes
Meta silicones
here is an example of what can be done by injecting spherical inclusions of a liquid dopant material into a silicone matrix material.
Bio Materials and SR¶
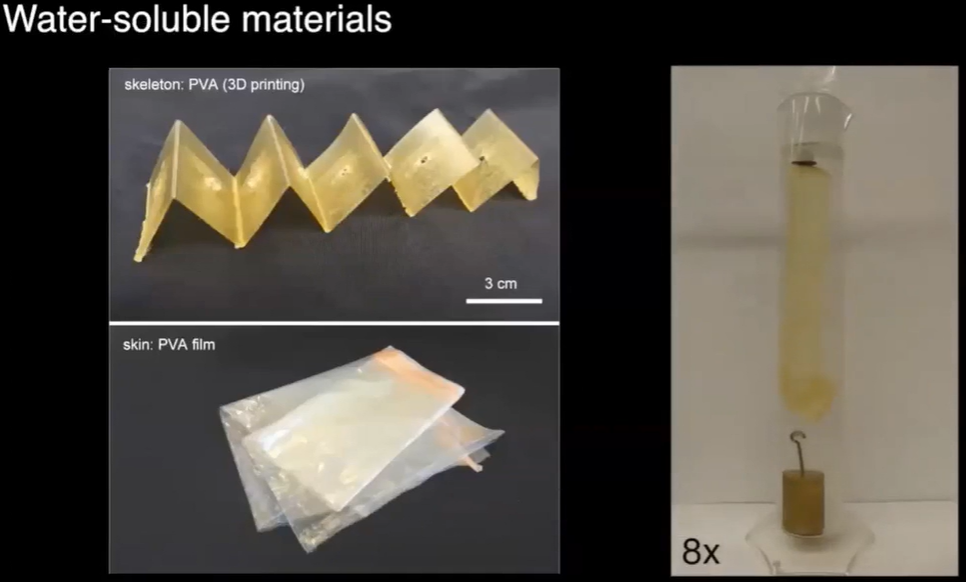
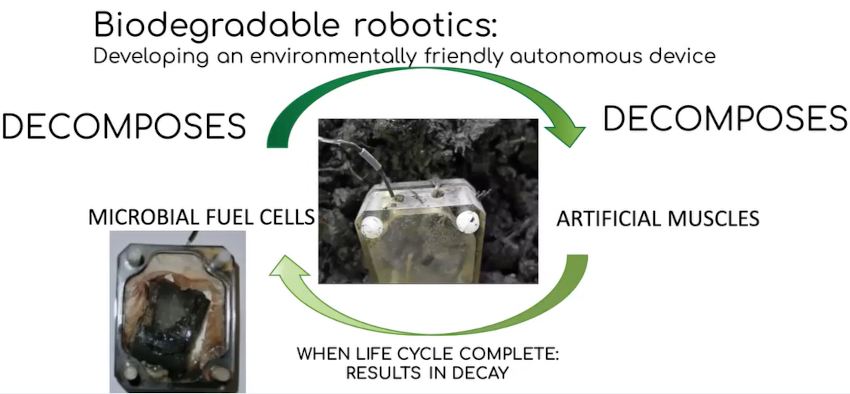
Biodegradability is a really nice concept to think about in this field: the idea is to bio-build a robot that will disappear as its mission is done !
Bio-Silicone¶
Gelatine can be used as a biodegradable actuator.
Some useful vocabulary¶
Technical words for softness (very useful when you're not totally fluent ;-)):
Bend, Squish, Stretch, Silkiness, Plushness, friction
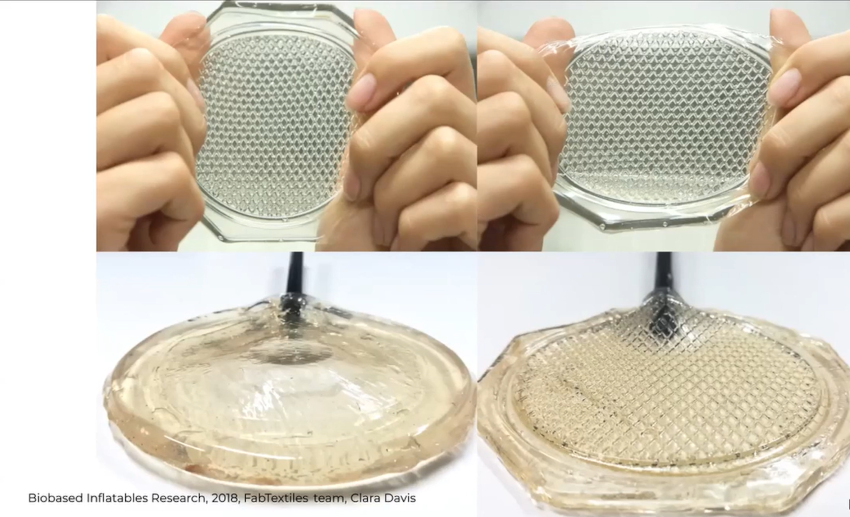
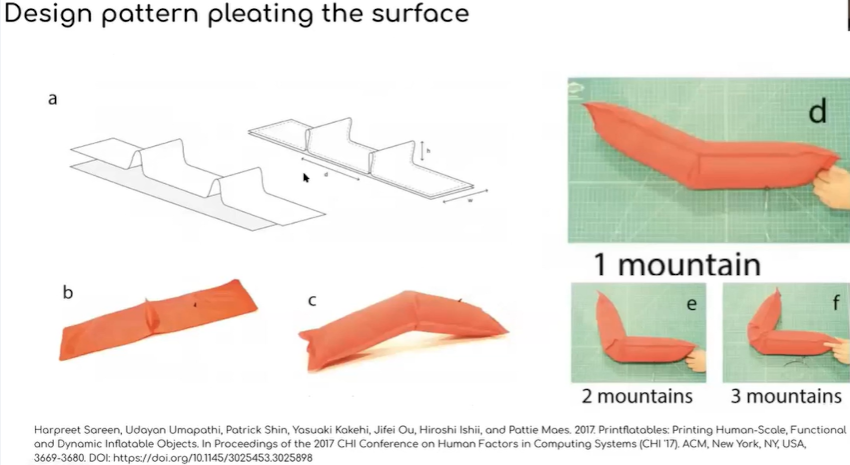
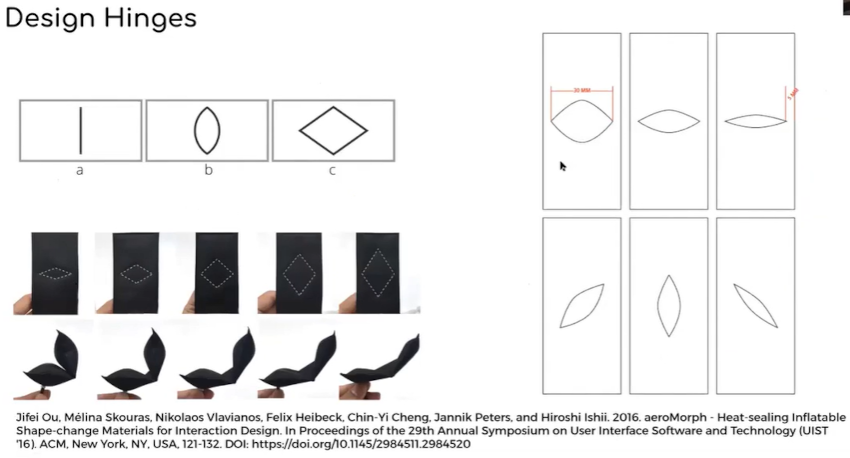
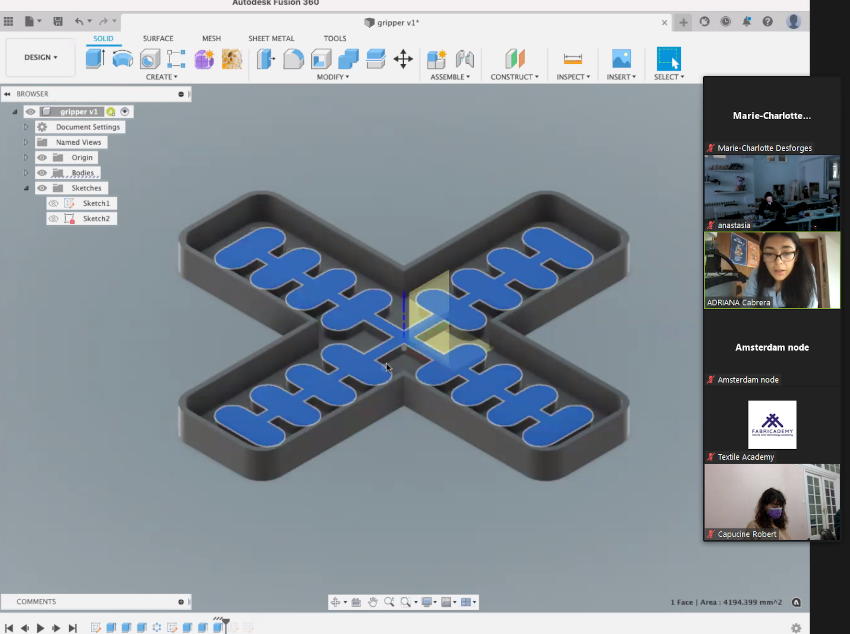
Patterns¶
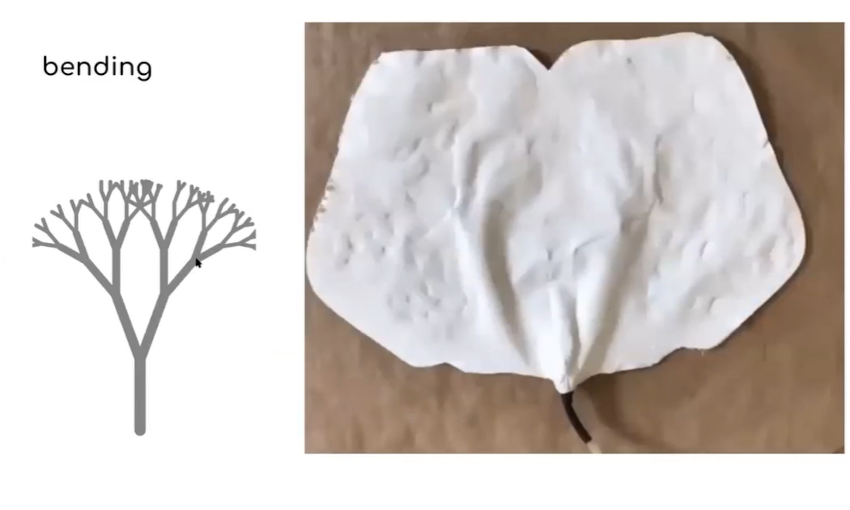
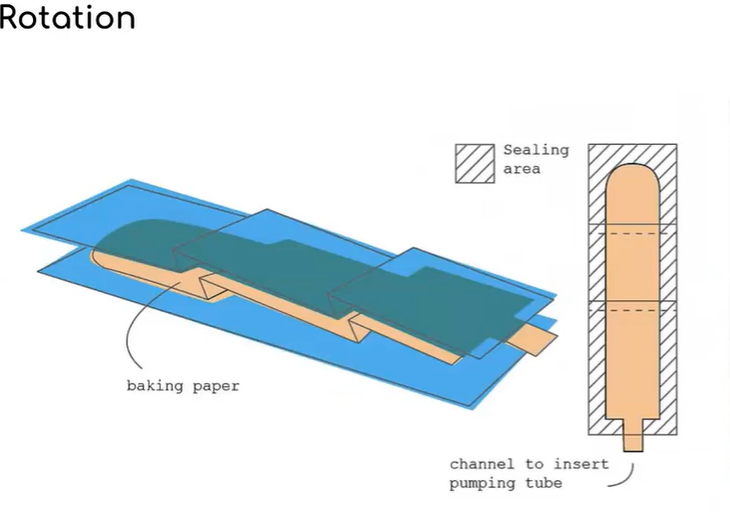
Depending on the pattern you make, you will obtain different shapes.
Think about the movement you want to create before designing your pattern. You can play with the sizes, the shapes, the thickness of yout materials etc... See some examples below :

Materials¶
Doing an inflatable on your own is quite simple, which makes it quite easy to make your own at home.
Here is a list of what you may use to achieve your soft robots.
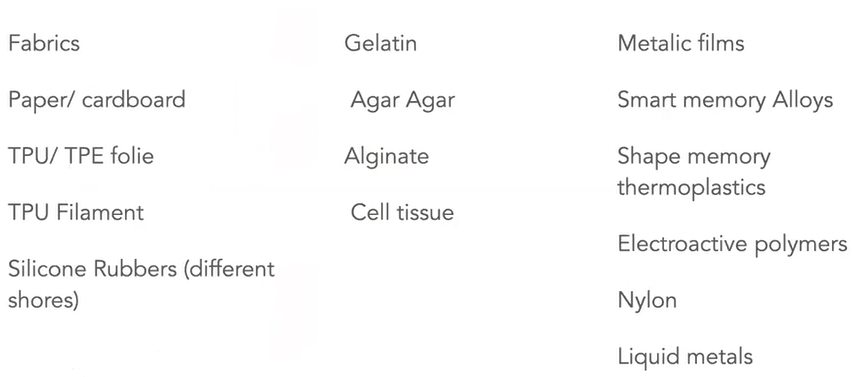
You're now ready to make your inflatable, let's follow the tutos !!
Experiences¶
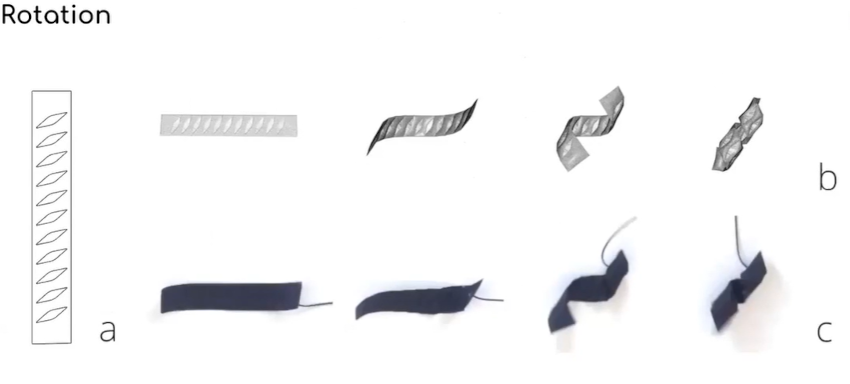
Experiment the different kind of patterns and fabrics or knitted pattern to see what's happening when inflating : Some make some rotation, or just contract...
You need a knitted cable, a long balloon (easier to work with since you need less pressure) or a tube of latex (different flexibility / resistance), screws for nylon and cable tights, connectors, and a syringe
Tuto 1¶
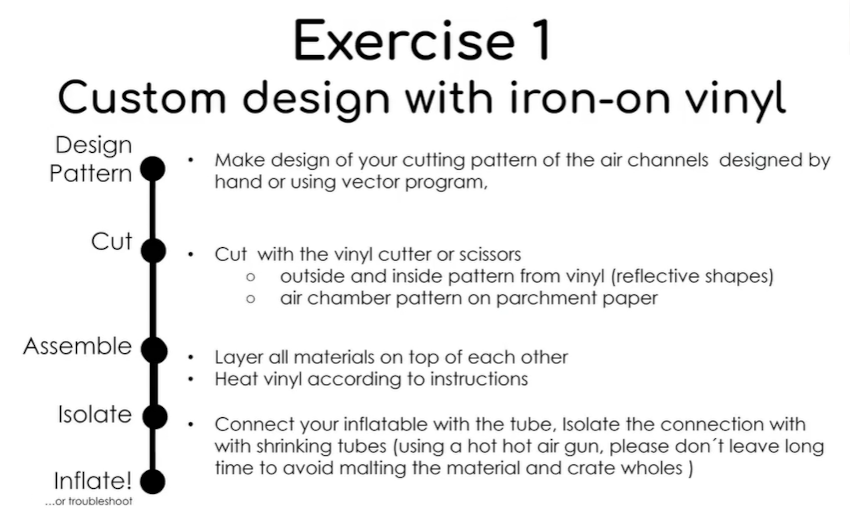
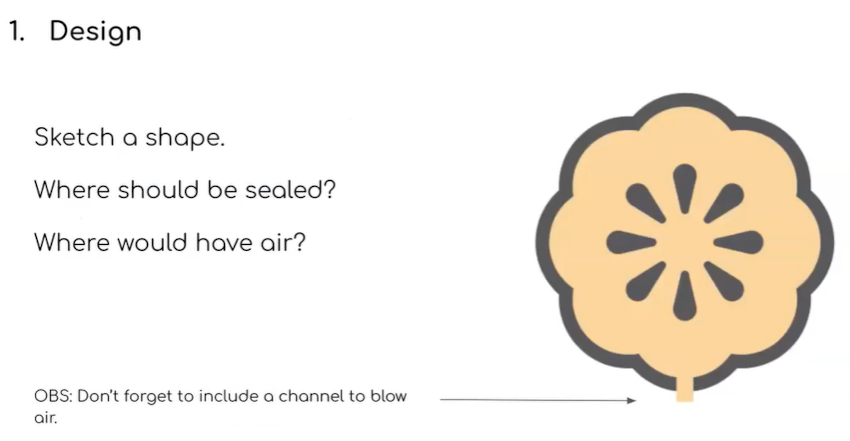
The one I decided to make on my own is this one :
I was very curious to make my own inflatable at home, but before all, I had to find the good materials !
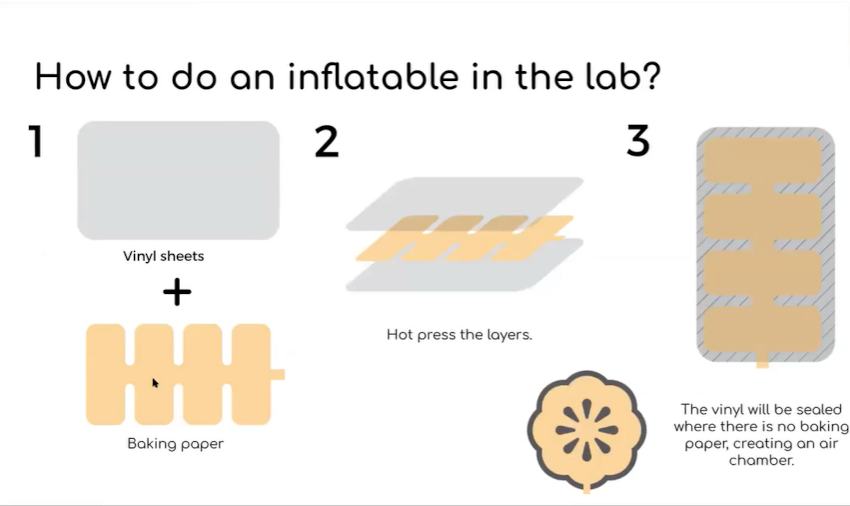
⇀ I need some Thermo-vinyl sheet, bakerpaper sheet, tubes and clamping joint.
⇁ I found :
- soft silicone straws which can make great tubes 👍

- Flex and glittering Thermo sheet for textile, which I thought would be perfect...
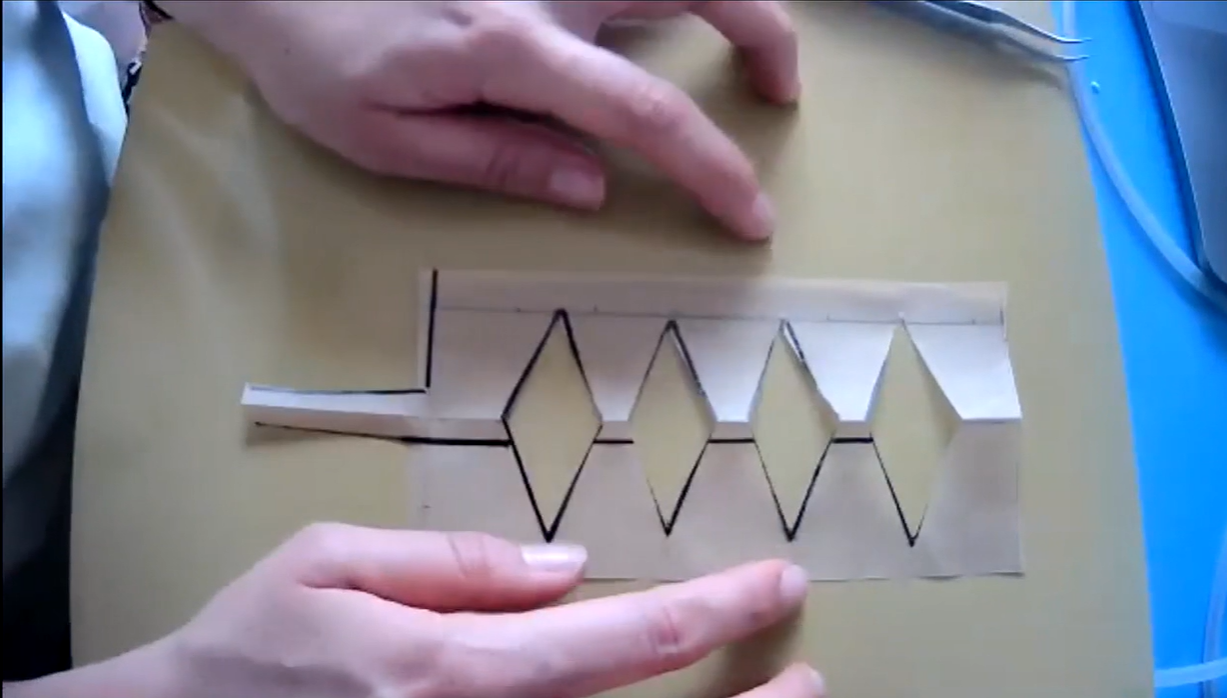
➟ Let's go for the pattern drawing, paying attention to the proportions and the good circultion of the air in the chamber, like Adriana showed us. I didn't took any risk in fact, as I didn't have much time to experiment, I did exactly what she showed us.
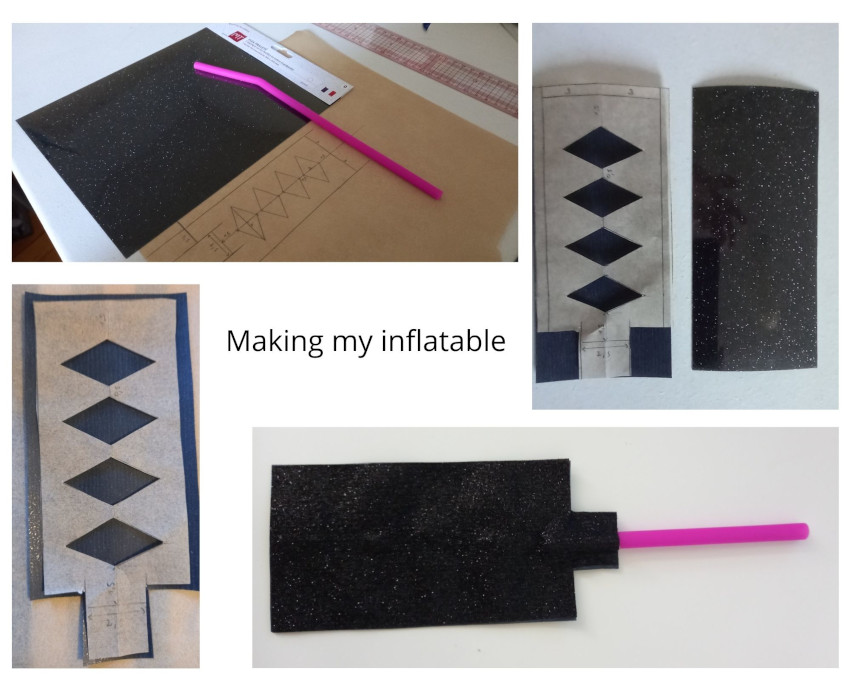
Unfortunately, my inflatable didn't work ! I guess that my flex paper isn't flexible enough. It reacts more as paper than as plastic that would inflate well. I will test it again when I go back to Oullins !!!
Tuto 2¶
- How to prepare a mold
Prepare the silicone and put it in the mold. Beware of destroy the bubbles Put it in the hoven with a very slow temperature : If you print it, don't put it in the hoven, just let it dry naturally otherwise it might be flat as needed + with thiner layer( relief spray, or oil to clean it to avoid generating bubbles ) Then paste it with the second pieces
Mold with 3 parts : the upper one, the under one and the skeleton in the middle. Put some tape all around after having poured the silicon to isolate correctly the mold. Relief spray or oil, then dry it correctly, and then pour the silicone.
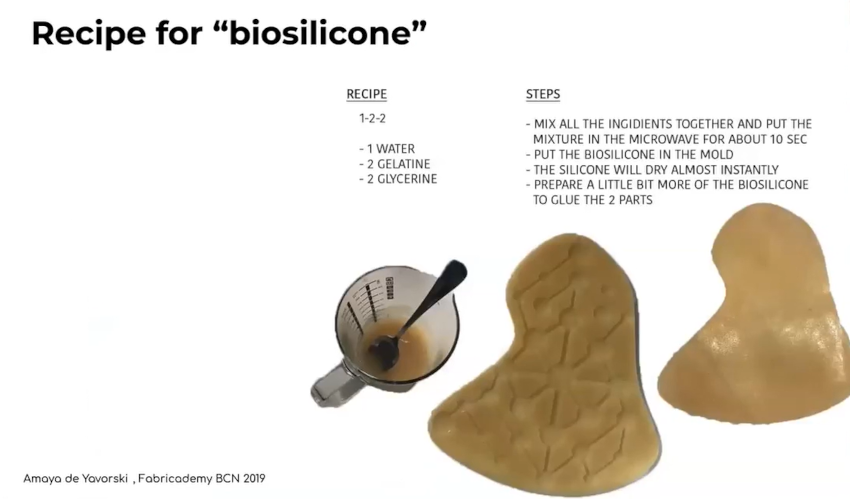
-Make bio silicone
Gelatine (from supermarket is OK) in powder of leaves. You have to obtain a very liquid solution.
You can follow the recipe mentionned above to have the good proportions.
Boil it slowly and make a 2nd layer to paste with the mold
For this type of mold, it is not recommanded to use textile because it looses water
Inflate the material we did
Here is a video by Adriana that will show you how to do :
In Oullins¶
The girls' band from the Textile Lab Lyon made great experiences that I want to present here !! I couldn't be with them this week but they shared what their results in short videos, and that's really funny 🤩🤩🤩
Further experimentation¶
In fact, I make a link between the underwater world and Soft Robotics
- the shapes, slow mouvements and contraction they make when they move,
- the slimy touch which looks like silicone
As soon as possible, I would like to make a mold with a starfish shape, and make each arm move independantly.
Let's look at this video that inspired me a lot !!

Useful links¶
References¶
Octobot
Biomimicry - Chao Chen, work inspired by the pine cone