12. Soft robotics¶
Week 12 - although we are at the end of the program and fatigue leaves its mark, this theme captivated me. It's an old love of mine - the tangency of textiles and medicine.
So far I have only had some theoretical knowledge in this field. This week I had the opportunity to experiment!
A busy week, with many trials ... and still few results to please me. If I have time and tools, I would like to continue experimenting in this very useful area.
Research & References & Inspiration¶
Soft robotics are robotic systems made of materials that are similar in softness to human soft tissues.
The enthusiasm generated by soft robotics comes from the convergence of different scientific communities for the design of these new machines. Born at the crossroads between chemistry, plastics engineering, and mechatronics, soft robots have now spread in a great number of directions, leading computer scientists to work on design processes adapted to their non conventional structural analysis, physicists and material engineers to innovate in sensing, power supply and information processing. Soft Robots Manufacturing: A Review
The following pictures demonstrate the possibilities of using soft robotics.

Process and workflow¶
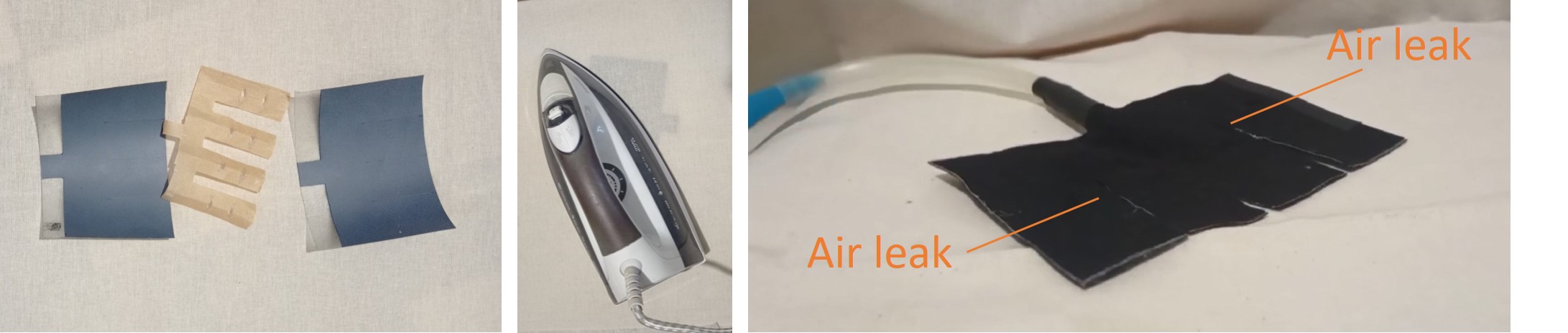
My first exploration - with coated fabric¶
... failure
The process included drawing and sketching the air flow, cutting, bonding. Then I inserted a tube at the end and used a shrink tube to seal it. I used a manual air pump to inflate it shape.
My second exploration - thermo-vinyl¶
Step 1 - trials¶
First successful exploration.
Second successful exploration.
Step 2 - sketches and sketch of the air flow¶

Sketches of the air flow I drew in Autocad software. I decided to try two different forms: cactus and butterfly. The sketches of the airflow, I also drew them different, inspired by the tutorial and course support for this week Lily Chambers & Adriana Cabrera. Fabricademy 2022-23 Week 12 Soft Robotics
Drawing pattern 1 - BUTTERFLY
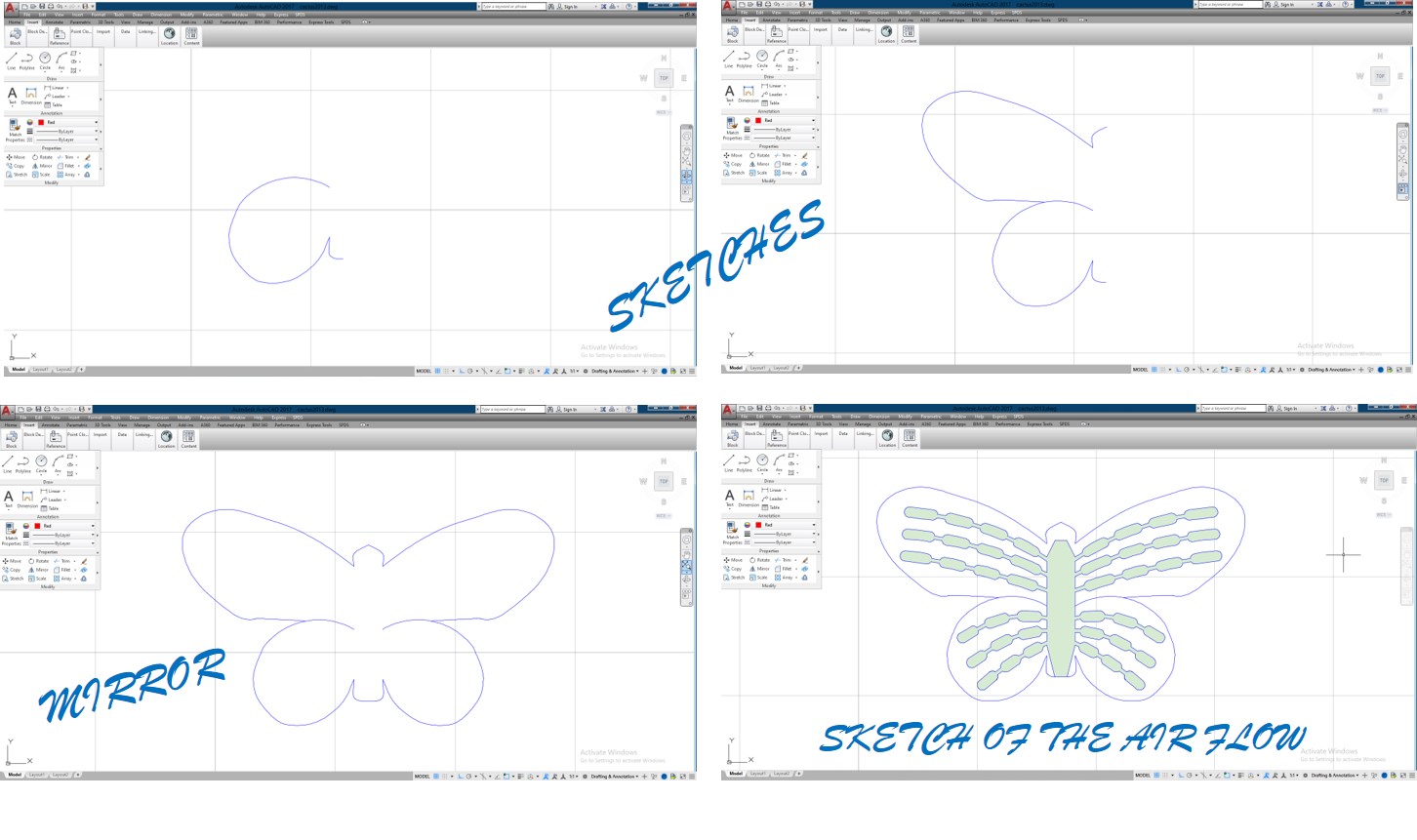
Drawing pattern 2 - CACTUS

The drawings in AutoCad software I saved in the format .pdf for being ready to cut the figure at Silhouette CAMEO machine.
Step 3 - cut & welding¶
To cut the thermo-vinyl I had the SILHOUTTE CAMEO machine at our disposal. Together with colleagues, we set up the machine and made the first attempts.

After setting the machine and successfully cutting out some sample shapes, I cut out the shapes drawn by myself.

I couldn't set up the Silhouette CAMEO machine for cutting baking paper, so I cut the baking paper with the help of shear.
In the following pictures I present some imagines from the trial.

Unsuccessful results¶
BUTTERFLY - not very successful
Conclusion: We did not achieve the desired result because the air ducts were too narrow, and the manual air pump did not allow the necessary airflow to be supplied. It would need an electric air pump.
CACTUS - I'm still not happy with the result
Conclusion: Vinyl layers stuck together in some places even where the baking paper was. The temperature regime when bonding was not set correctly.
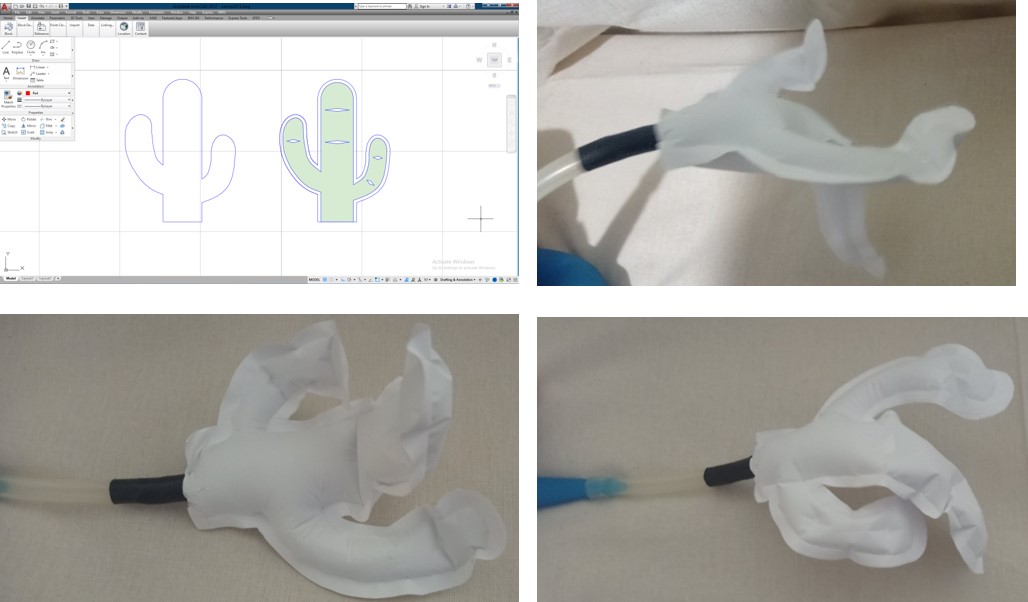
Results my second exploration¶
I decided to repeat the second drawing. This time modified the sketch of the airflow. I repeated the same steps: cutting and bonding. In the result I got a successful example. Yes, I did it! I got a shape that mimics the movement of the fingers.
My third exploration - silicon inflatables¶
Step 1 - printing shapes¶
Form for printing I downloaded it from Silicone Bending Actuator and I adapted it to the desired dimensions.

I choose this form which is composed of 3 parts: one part is that has the air channels; other part is that closes the open part of the channel; and the last part is the base of the mold.
360 view of my mold
I printed the forms at one of the FabLab printers. For 3D printing of shapes I used PLA filament. Setings for PLA filament: Layer Height: 0.2 mm Temperature: Nozzle: 210 оС Bed: 65 оС Retraction: Nop. (we don't use retraction) Print Speed: 50 mm/s.
Here are presented the forms prepared for casting.

Step 2 - silicone casting¶
I used this type of silicone.
It's a very flexible titanium based silicone that comes in 2 different components, that should be mixed together.
-
Before pouring the forms I sprinkled them with this solution: 3 times, every 30 minutes.
-
Mix A bootlle and B botle with a ratio of 1:1.
-
Mix everythig well and when you are ready carefuly pour into the mold.
-
After about 24 hours I removed the form.
-
I glued two parts of silicone and now I wait for it to dry.

Step 3 - blow the silicon form with air¶
Results my third exploration¶
To inflate the silicone shape I used a manual air pump and an electric air pump. In both cases the shape moved, but did not achieve the desired movement.
Conclusion: the manual pump used does not have the necessary power to put the silicone form into operation. Also, the electric pump failed to act with the power needed to achieve the desired movement.
References¶
1. Soft Robotics in Medical Applications
2. Biomedical soft robots: current status and perspective
5. What is the soft robotics toolkit?
6. Soft Robots Manufacturing: A Review