12. Soft robotics¶
Research¶
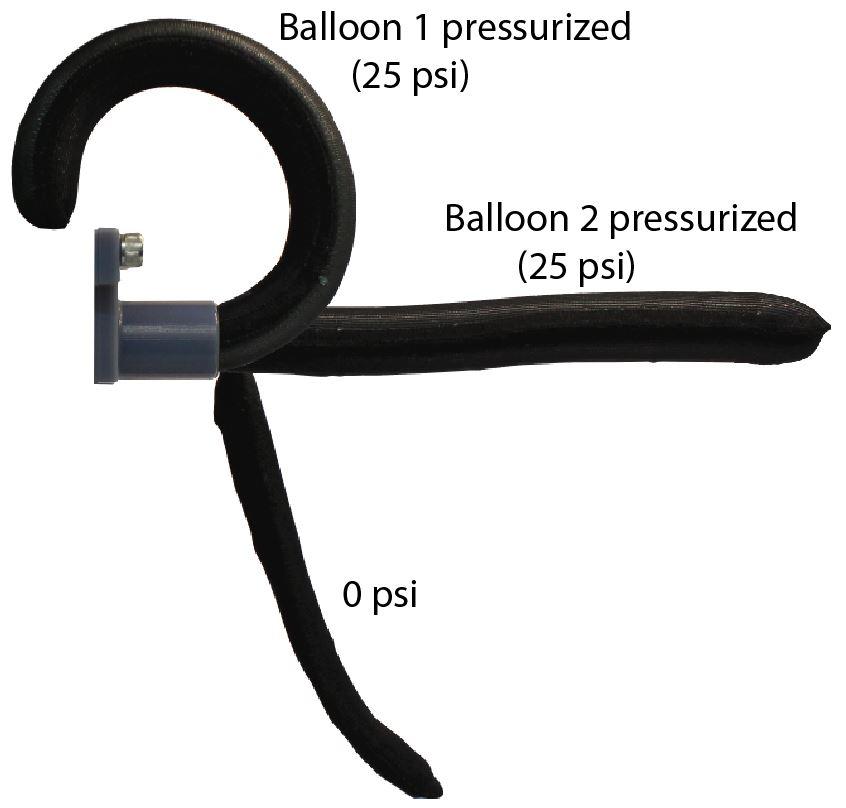
Knit textile bendig actuators The concept is pretty simple: two different knitted fabrics with different stretching capacities are seamed together and an inflatable balloon is put between the fabrics. Depending on the air pressure the actuator will act differently.
The basis of the design utilizes layers of fabric with different stretch properties in order to achieve complex motions.

Heat sealing vinyl¶
Zigzag¶
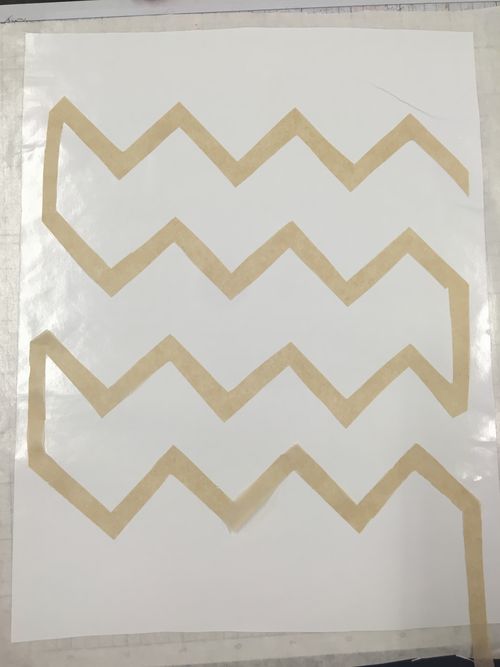
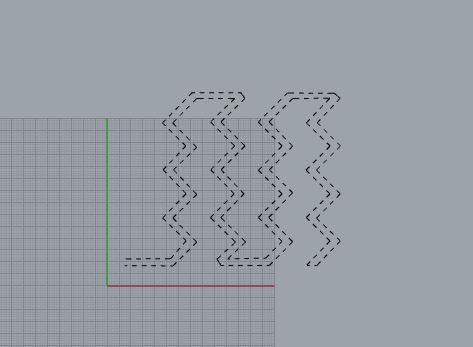
To make a folding structure I made a zigzag form into two pieces of vinyl.
I designed it in Rhino
I tried to use the Cameo silhouette cutting machine to cut the baking paper but as the baking paper is not sticking to the Cameo mat, it was very hard and I failed.
So I cut the baking paper with the cameo but with dotted lines and then cut with scissors following the lines. I used pre glue vinyl and stuck two vinyl pieces together with the baking paper in between.
It worked but the vinyl tended to unstick on the sides of the baking paper making the form to change a little.
I should have used a heat sealing vinyl instead of a preglued vinyl.
Circle¶
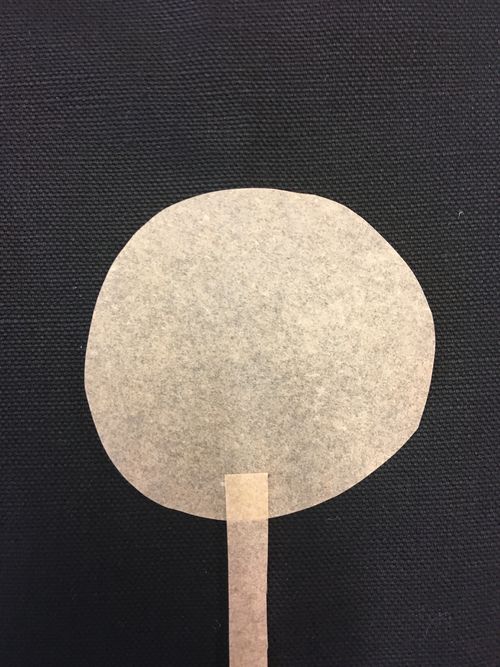
For the second try I made some very simple shapes, a circle and a square and used heat sealing vinyl.
I put the baking paper between two pieces of vinyl and used the heat press to stick the pieces together (25s at 165 °C). The temperature or the time could have been lower, we can see that the vinyl is a little overheated.
It's working pretty well and can make forms to changes and moving paper.
Grasping robot¶
I used some molds that were in the lab to try making a grasping mold.
I used the silicone and put a piece of fabric on one mold in order to get different deformations.
The silicone I used is the Elite double 8, he had a 10min working time and 20min setting time.
I started by mixing the two components and removed the bubbles in the vacuum machine.
After that I put the silicone in the molds and waited for the end of the first 10min.
I waited another 5 minutes and then removed the part with the air chambers from the mold and put it on the other piece in order to make the two pieces to stick in the last 5 minutes.


For the first try, I used a piece a coton, but the piece was a little to thick and it was hard to stick the pieces together.
For the second try, I made a small and thinner piece of coton fabric. It was better but I failed getting an airtight piece.
The two trials failed, they were not sealed enough and they were some air leaks in both cases, so the grasping didn't work.
Bubbles¶
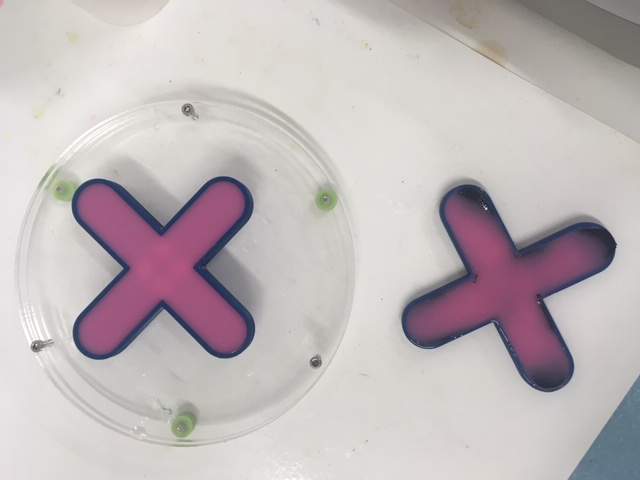
I then made my own silicon mold.
In Fusion 360 I made a rectangle with insides circles in order to make bubbles with the silicon, and an other box to close the mold.
I then 3D print the mold in two pieces.
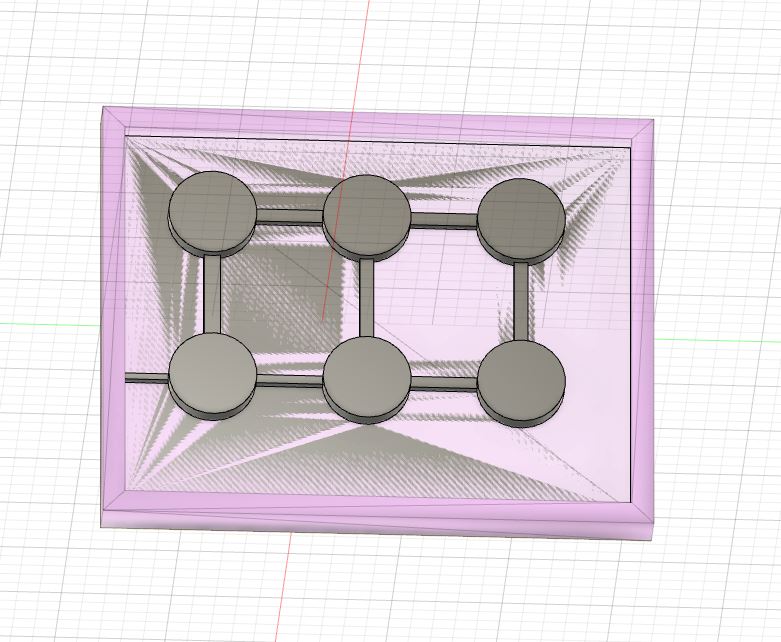

In order to get something airtight I kept a good distance between the holes and the sides to get large sealing sides.
It's working but the circle could have been bigger in order to get a more intersting result.
Origami thread workshop¶
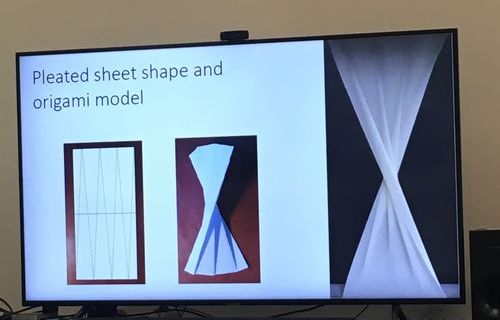
On Friday I followed a workshop about Origami thread.
In this workshop, Julien Chopin presented the state of his latest research on the field of functionalized yarns.
He showed that deformation when fibers are twisted at 180°C can be modelized with origami folds.

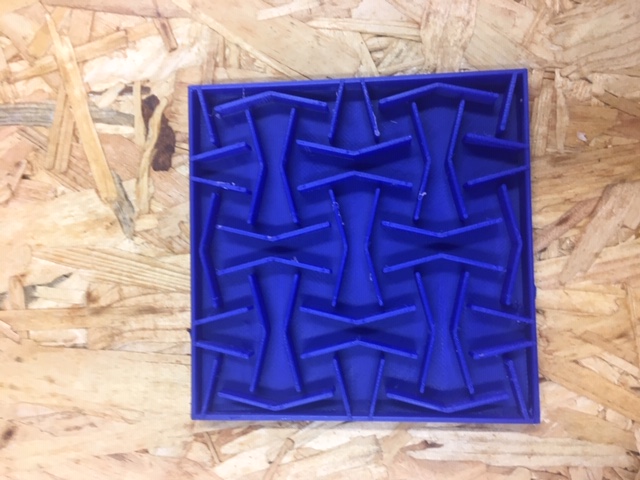
Auxetic mold¶
Still working on the auxetics patterns I made a mold in order to make silicon auxetics patterns.
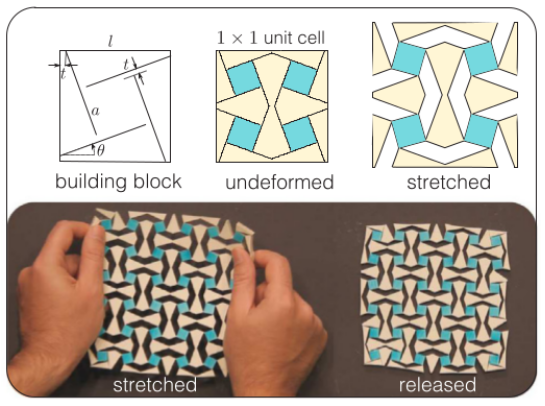
References : Bistable Pattern Generator Bistable Auxetic [Rafsanjani, Extreme Mechanics Letters, 2016].