12. Soft robotics¶
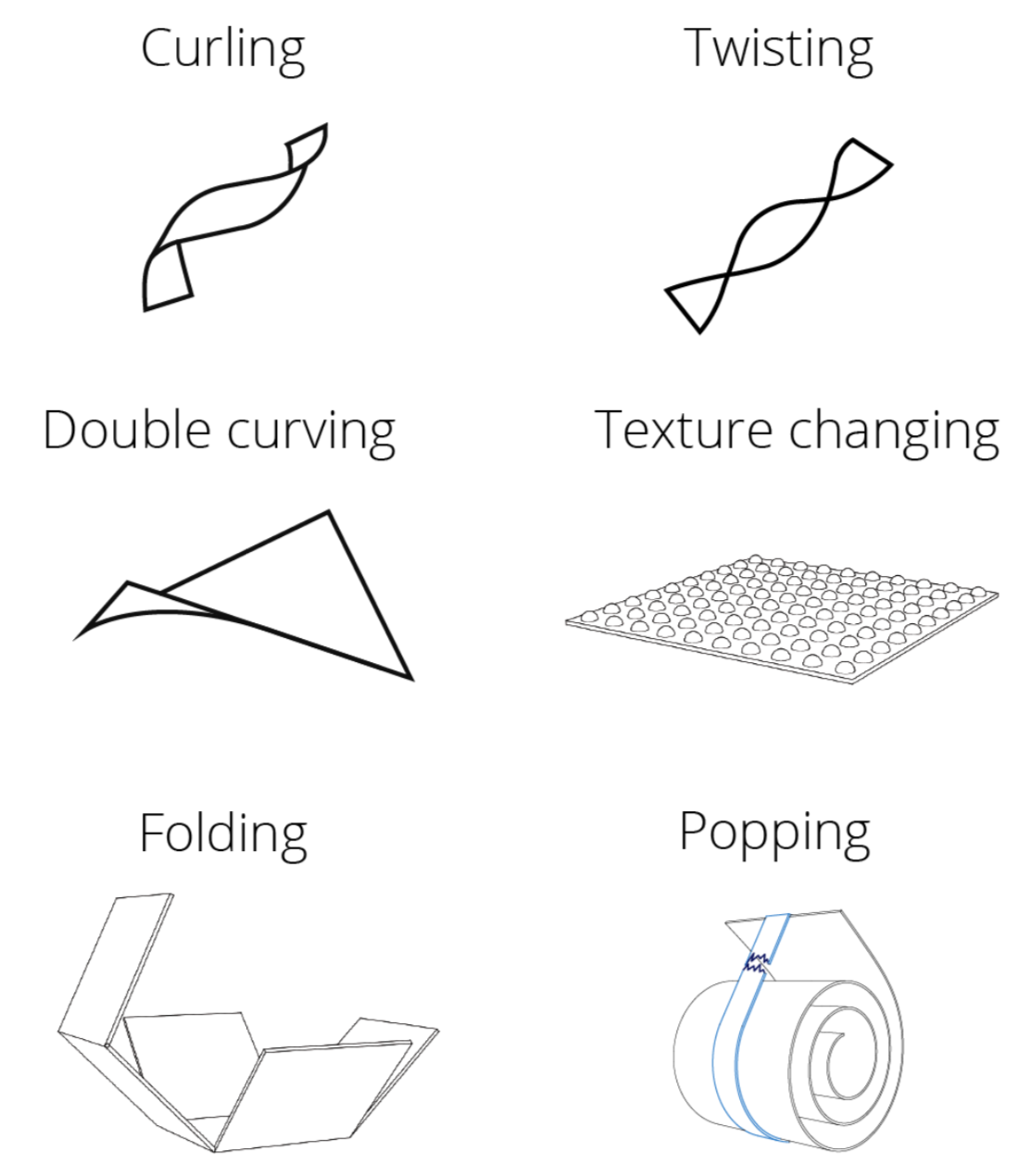
This week I learned about different actuation methods for soft robotics like pneumatic shapes and biomimicry.
Inspiration¶
Ernst Haeckel was a medic, zoologist and illustrator (and much more). Mostly known for the published artwork including over 100 detailed, multi-colour illustrations of animals and sea creatures.
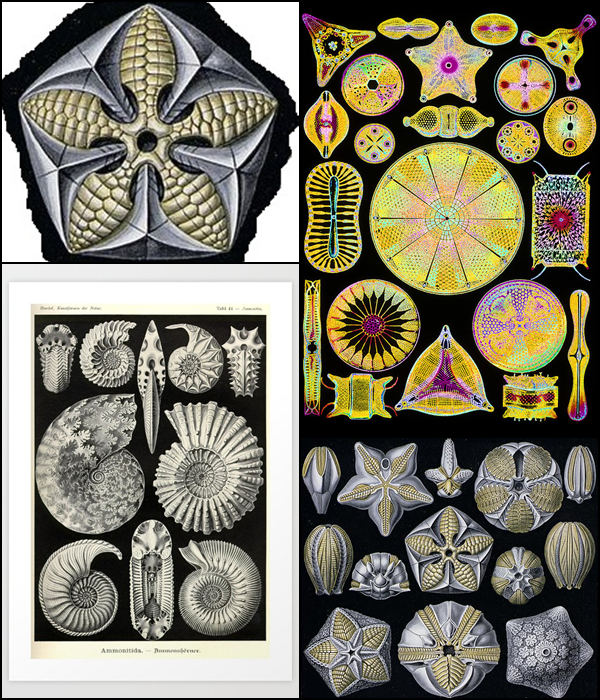
I have a book "Art Forms in Nature" from Ernst Haeckel at home and I wanted to use one of his drawings for an assignment as a reference. His work is so inspiring and it is lovely to watch all the different creatures with its anatomical details expressed in a very artistic way. I chose some kind of sea star that could be brought back to life with soft robotics using it´s anatomic structure as air channels.
Process¶
To create an inflatable biomimicral object I used Rhino for the 3D modeling, a 3D Printer to make a mold and silicon to cast the final shape.
3D Modeling the Mold¶
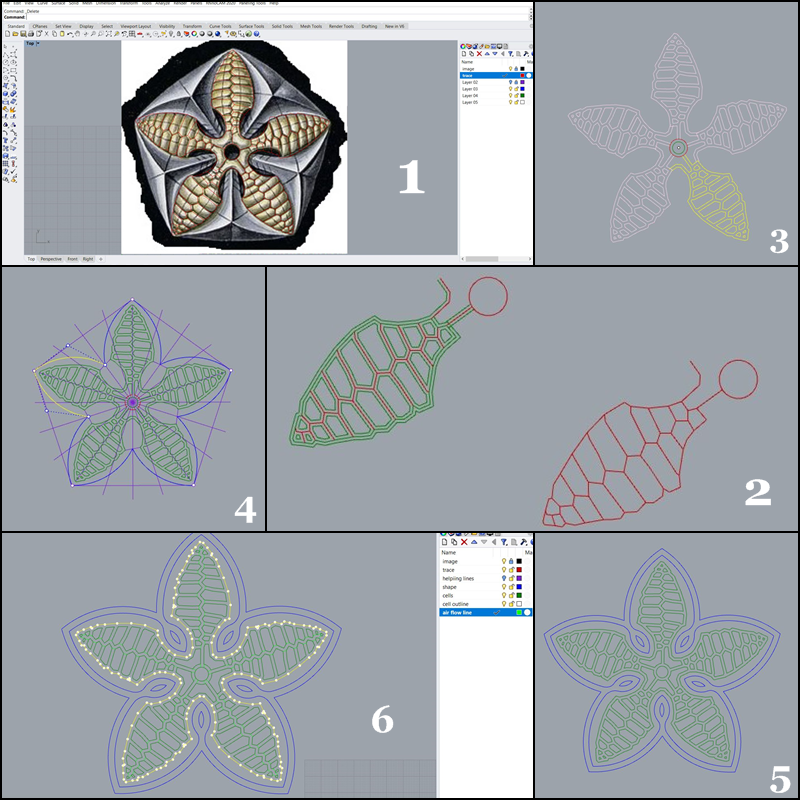
To begin with the 3D mold, I started tracing the drawing of Ernst Haeckel in 2D in consideration of closed possible air flow channels, deciding to blow it up from the centre. After that I arrayed the shape to get a similiar copy of the drawing and closing all the lines. Then I created doubled lines for the air channels and an outline for the second mold to close the base.
3D Printing the Mold¶
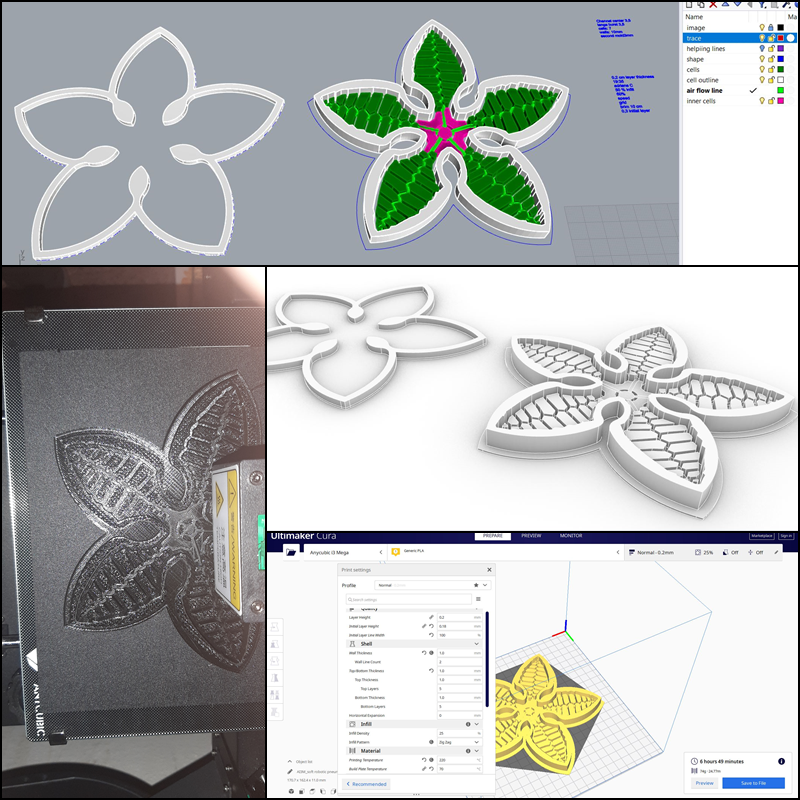
To make a 3D mold that can be inflated when casted I extruded all outer lines, inner channels and cells in different hights according to recommendation of the tutor Adriana and her experience. And also tapping the bases with about 0,3 mm.
Channel Centre: 3,5 mm Air flow Channels: 3,5 mm Cells: 7 mm Outer wall: 10 mm Second Mold outer wall: 3 mm
The print for both molds that have a diametre of about 150 mm, took about 10 hours to print.
0,2 mm Layer thickness 50 % infill 50 % speed grid infill 0,3 mm first layer
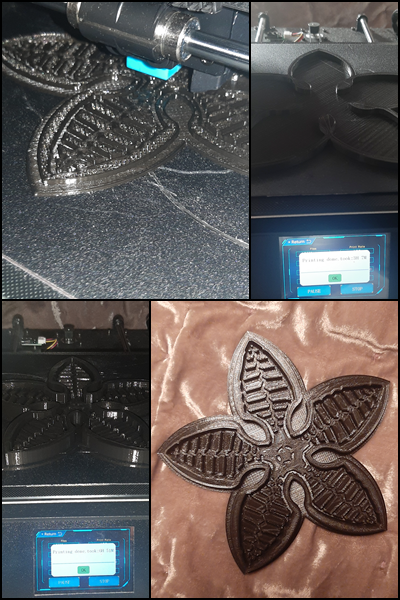
Silicon Casting¶


Final and Blow-up Test¶

For the casting process I first brushed the mold with vaseline to prevent the silcone from sticking to it and break. To find out how much Silicone I have to mix I used water to measure the amount. I used "Dragon skin 10 fast" in ratio 50 : 50.
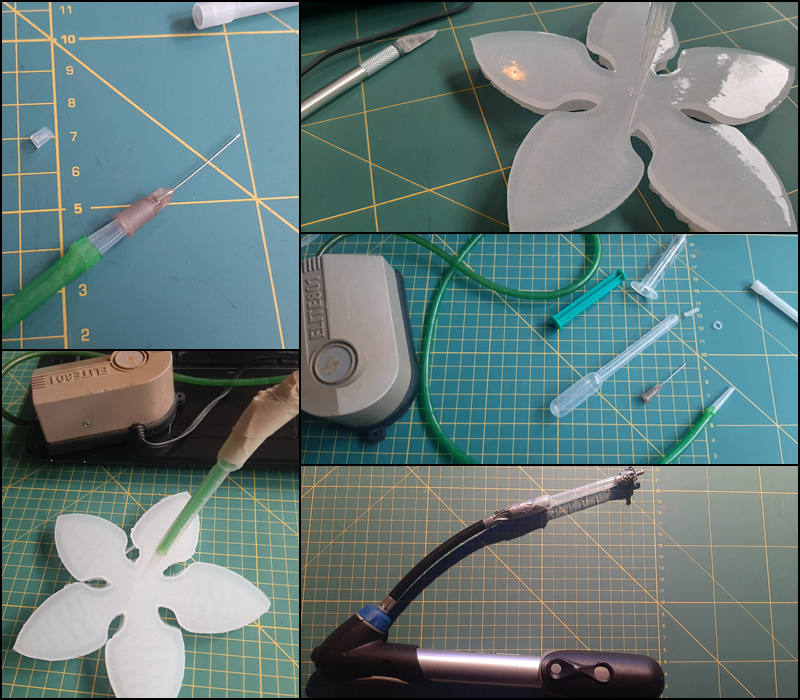
I improvised with some techniques and self made equipment to blow up the silicone shape, but I was not succesful. I sticked together tubes, ventiles, seringes and cutted pipettes and tried out airpumps for bycicles and super low power aquarium pumps.
Another problem it may not worked was that the model was leaking on one corner so I had to close the little airhole. I want to try it again and order some professional soft robotic air pumps and tubes.
Inflatable Vinyl Shapes¶

In our live hands on tutorial I made a simple pneumatic shape with heat press vinyl and cutted pattern of baking pattern. Therefore the aquarium pump was serving well. This is a great little interactive artwork to do with kids in a workshop I think :)
Fabricademy Lectures: Soft Robotics¶
Fabricademy 20-21 WEEK 12 - Soft Robotics from Fabricademy, Textile Academy on Vimeo.