12. Soft robotics¶
Research¶

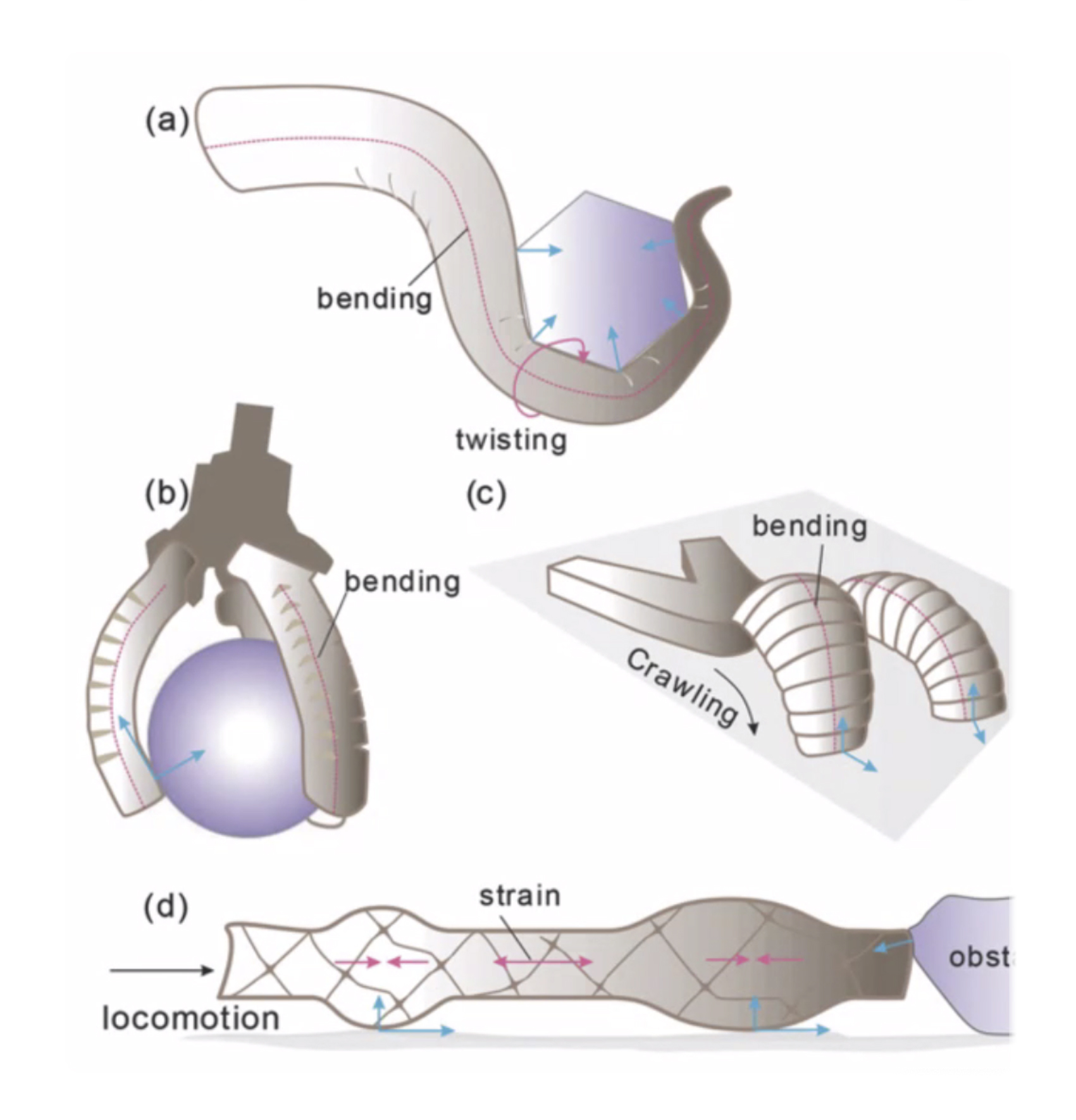
Conventional robots are made of rigid parts that often makes them vulnerable to bumps, scrapes, twists, and falls, soft robotics on the other hand can resist many such kinds of damage. They are also often cheaper and simpler to make, comparatively lightweight, and safer for people to be around.
Soft robotics often aim to mimic natural biological motion. Differing from rigid structures that appear and move in mechanical ways, and can appear more approachable for humans.
They can be messy: Scientist designed a new type of soft, robotic gripper that uses a collection of thin tentacles to ensnare objects, like how jellyfish collect stunned prey. Alone, individual tentacles, or filaments, are weak. But together, the collection of filaments can grasp and securely hold heavy and oddly shaped objects. The gripper relies on simple inflation to wrap around objects and doesn’t require sensing, planning, or feedback control.
 link
link
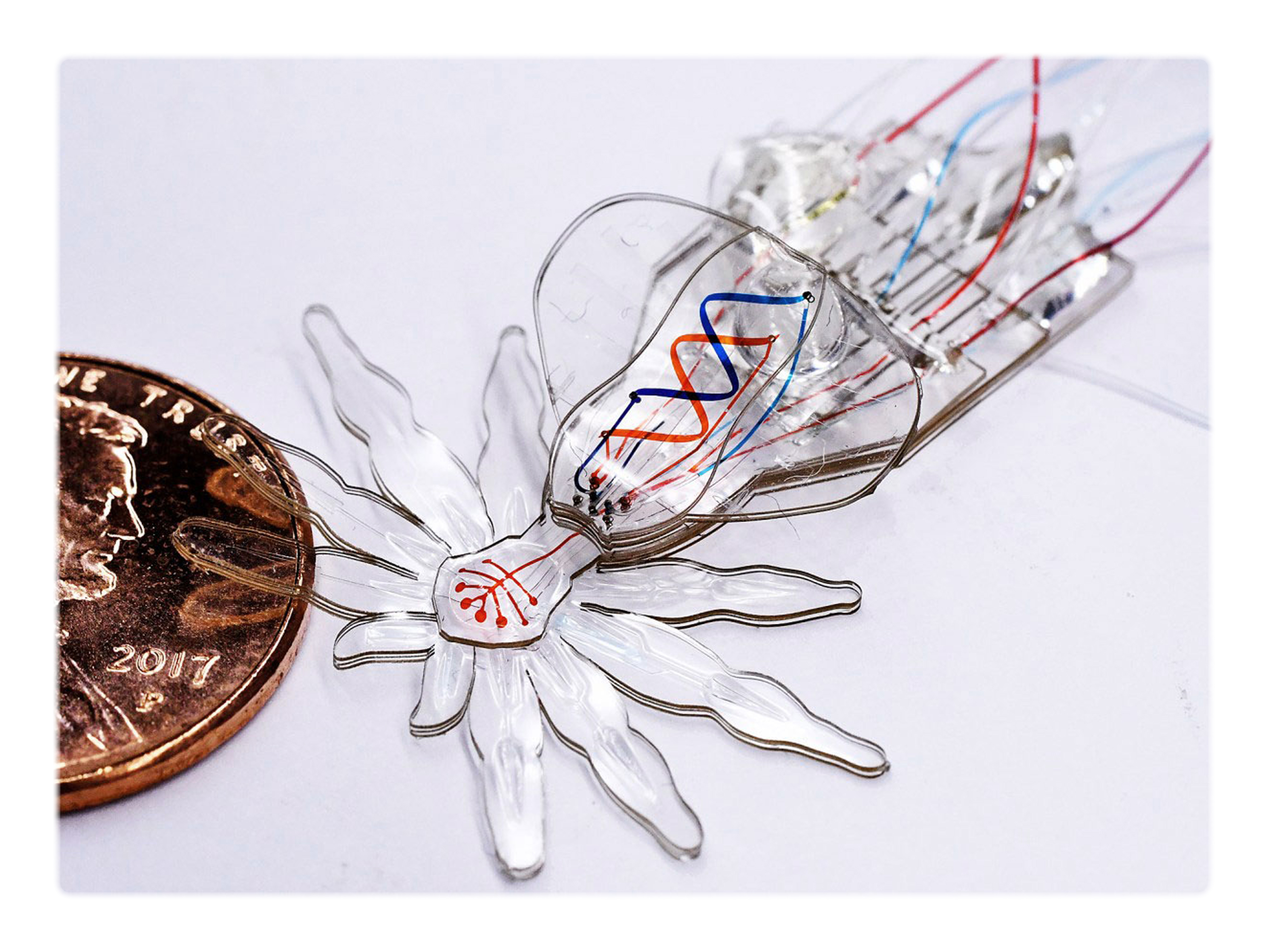
And tiny: A team of researchers at Harvard’s Wyss Institute for Biologically Inspired Engineering, Harvard John A. Paulson School of Engineering and Applied Sciences (SEAS), and Boston University developed a fabrication process that enables the design of soft robots on the millimeter scale with micrometer-scale featuresm, they created a robotic soft spider
 link
link
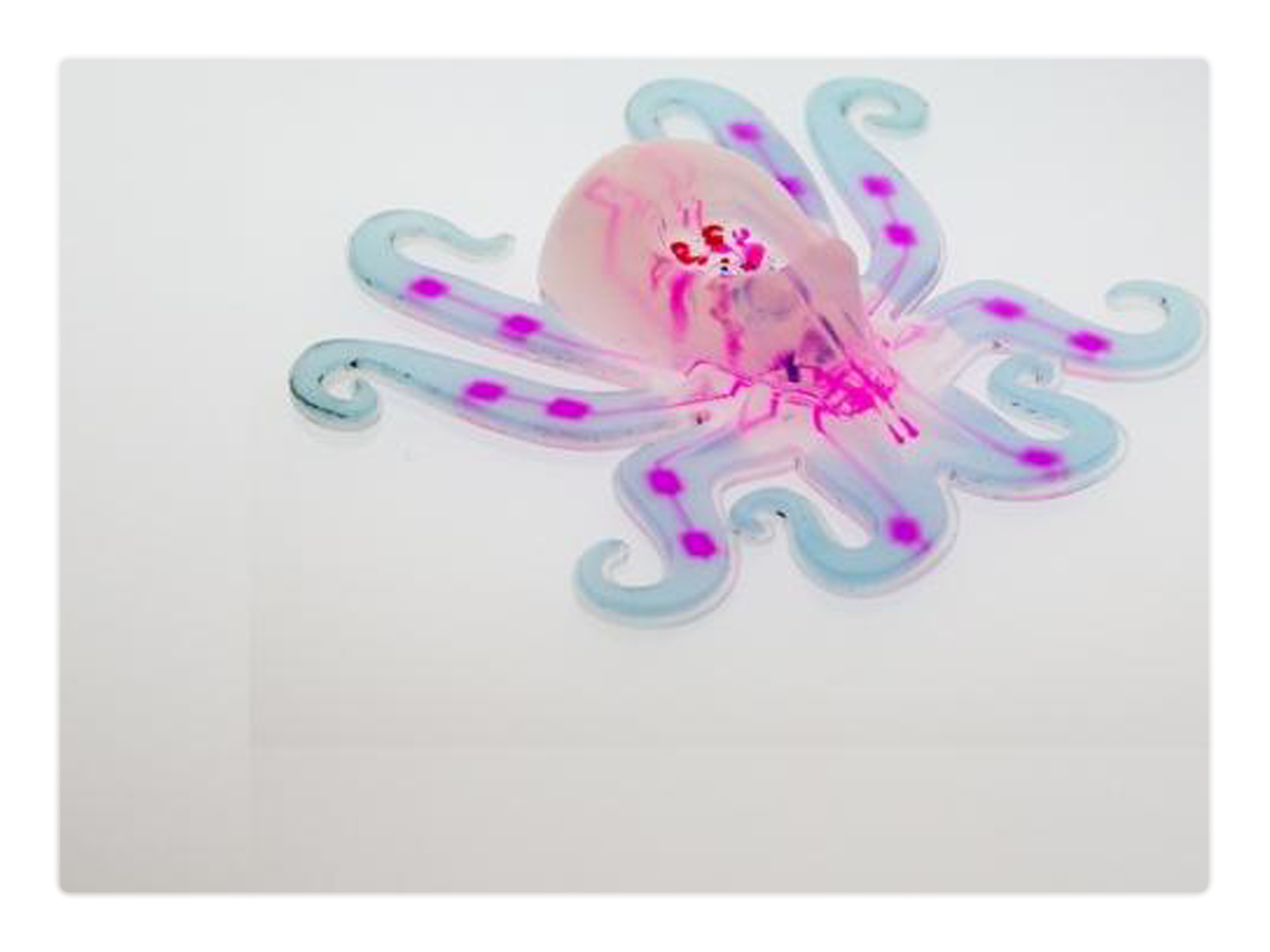
They also developed this very cute octopus that have no rigid components. It is powered by a chemical reaction and controlled with a microfluidic logic that directs the flow of fuel. The logic circuit acts just like a circuit board, autonomously directing fuel
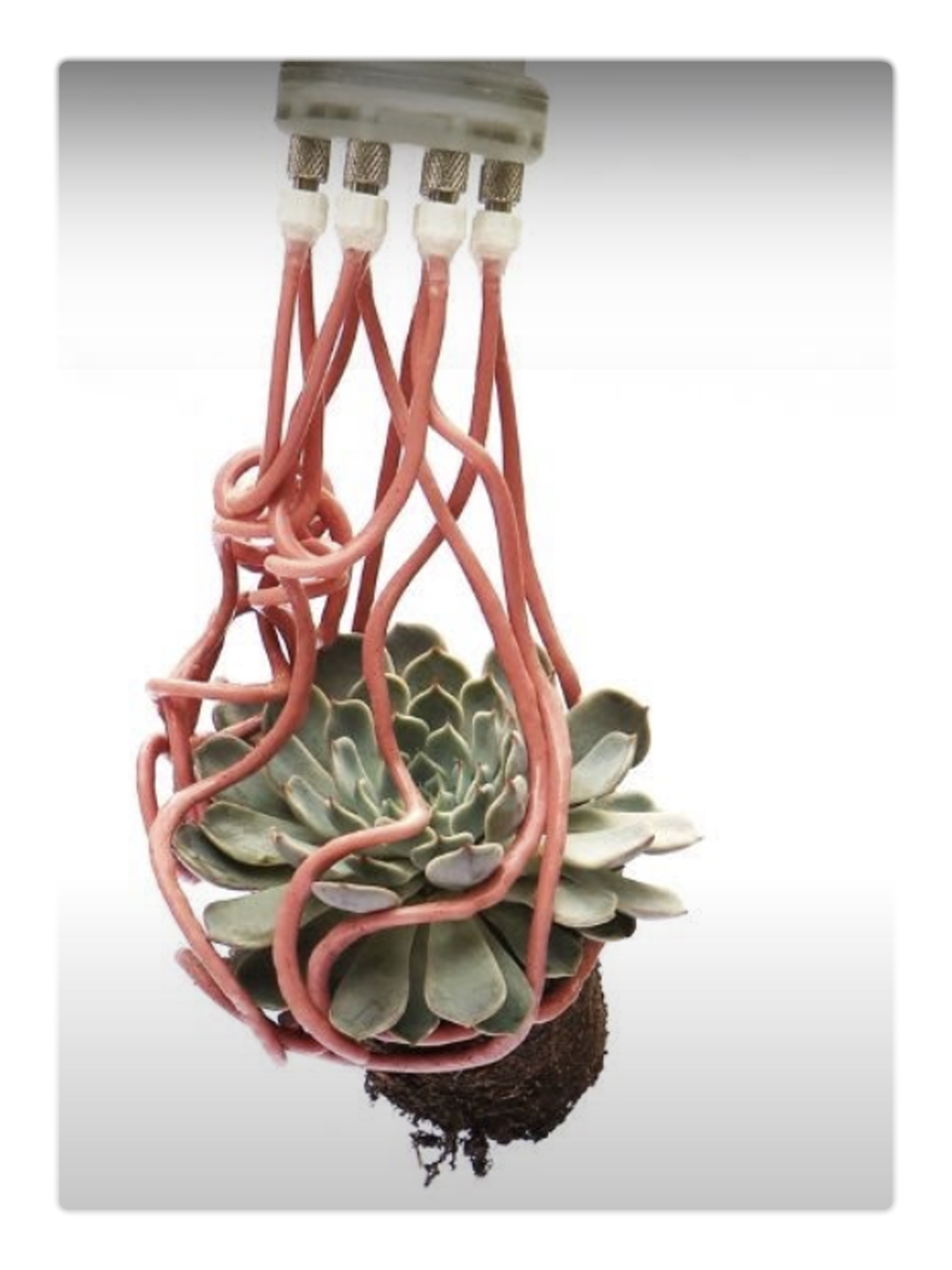
Or smelly: One problem with soft robotics is overheating as with our human body it is hard to integrate hard components like radiator and fans to keep them cold so reasearches at Facebook Reality Labs have developed sweating robots. The back of each finger was dotted with microscopic pores. at higher temperatures, the material expanded, dilating the pores and letting the water in each finger sweat out.
 link
link
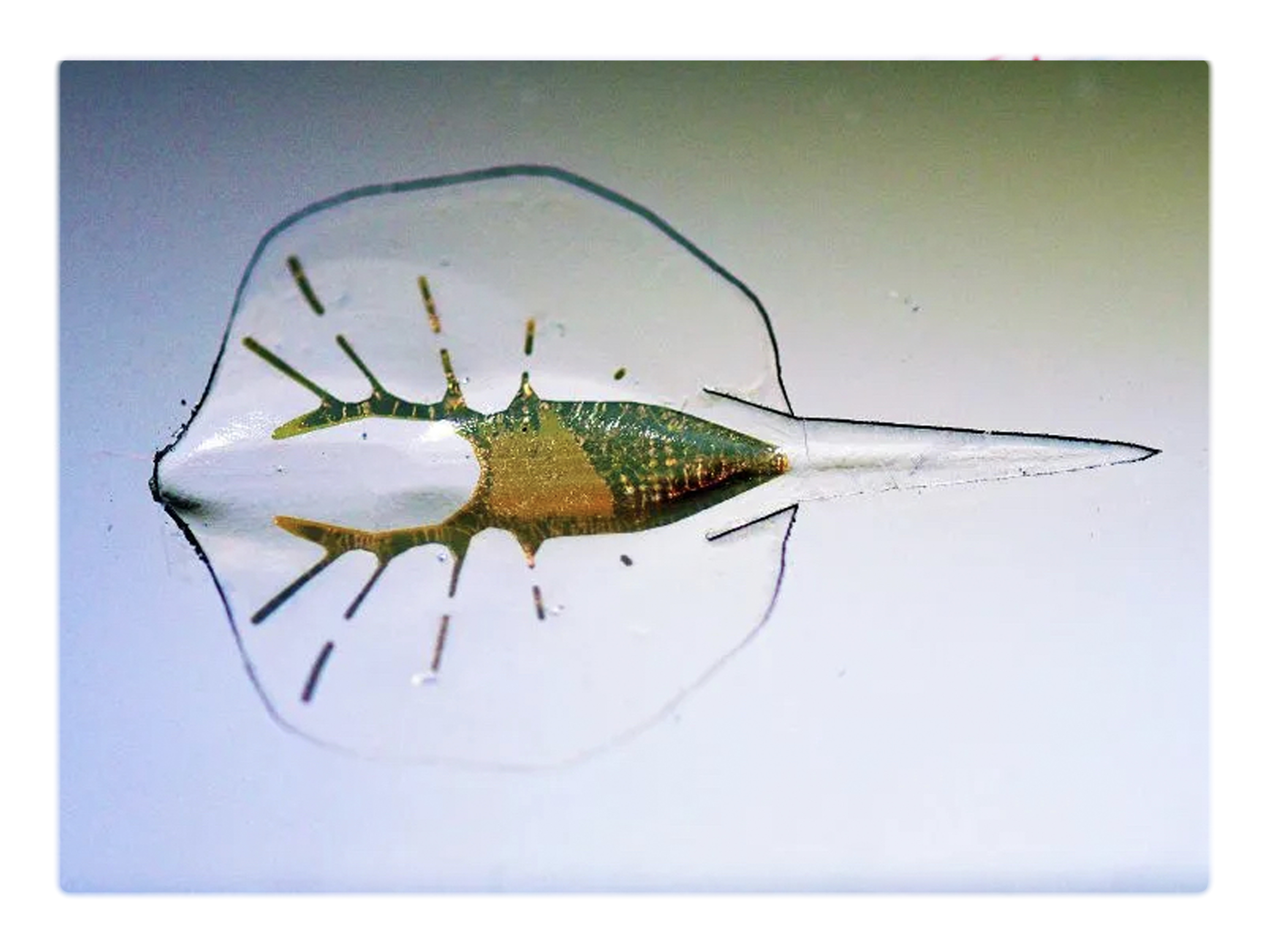
But maybe in the future they not only mimicking the natural world but actually using it.
Inspired by the movement of a stingray, researchers have created a robotic equivalent made using cells from the heart of a rat that can be controlled by light.
 link
link
Its not hard to imagine a Frankenstein future where living “materia “ gets shaped in new forms, and reinforced by highperformance materials.
What super-power do you wanna have?
Assigment¶
Thinking about our relationship with robots I thought it could be interesting to think about jewellery as an emotional relationship between wearer and object.



 Inspired by worm/snake crawling jewelry and different fidget toys I started to develop a whorm bracelet in silicone.
Inspired by worm/snake crawling jewelry and different fidget toys I started to develop a whorm bracelet in silicone.
Design:¶
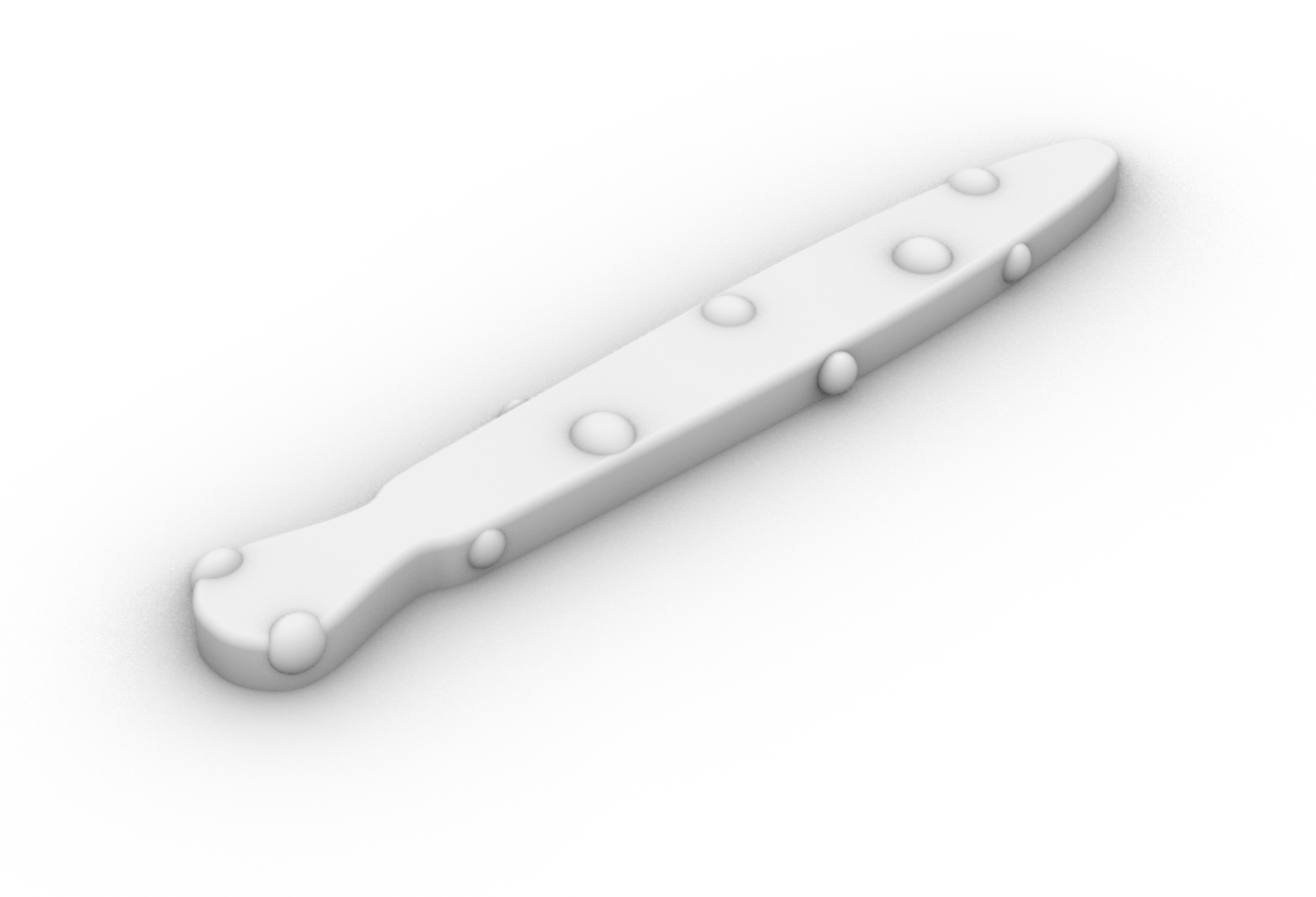
Since the design needs to be hollow we need to be careful with the design development, I decided on a simple worm shape with some blop patterns to give it an animal like appearance.
I draw thee design as a polysurface in Rhino.
Created the air channels inside by making an array of surfaces and then cut them out with Boolean difference (2mm smaller than outer shape)
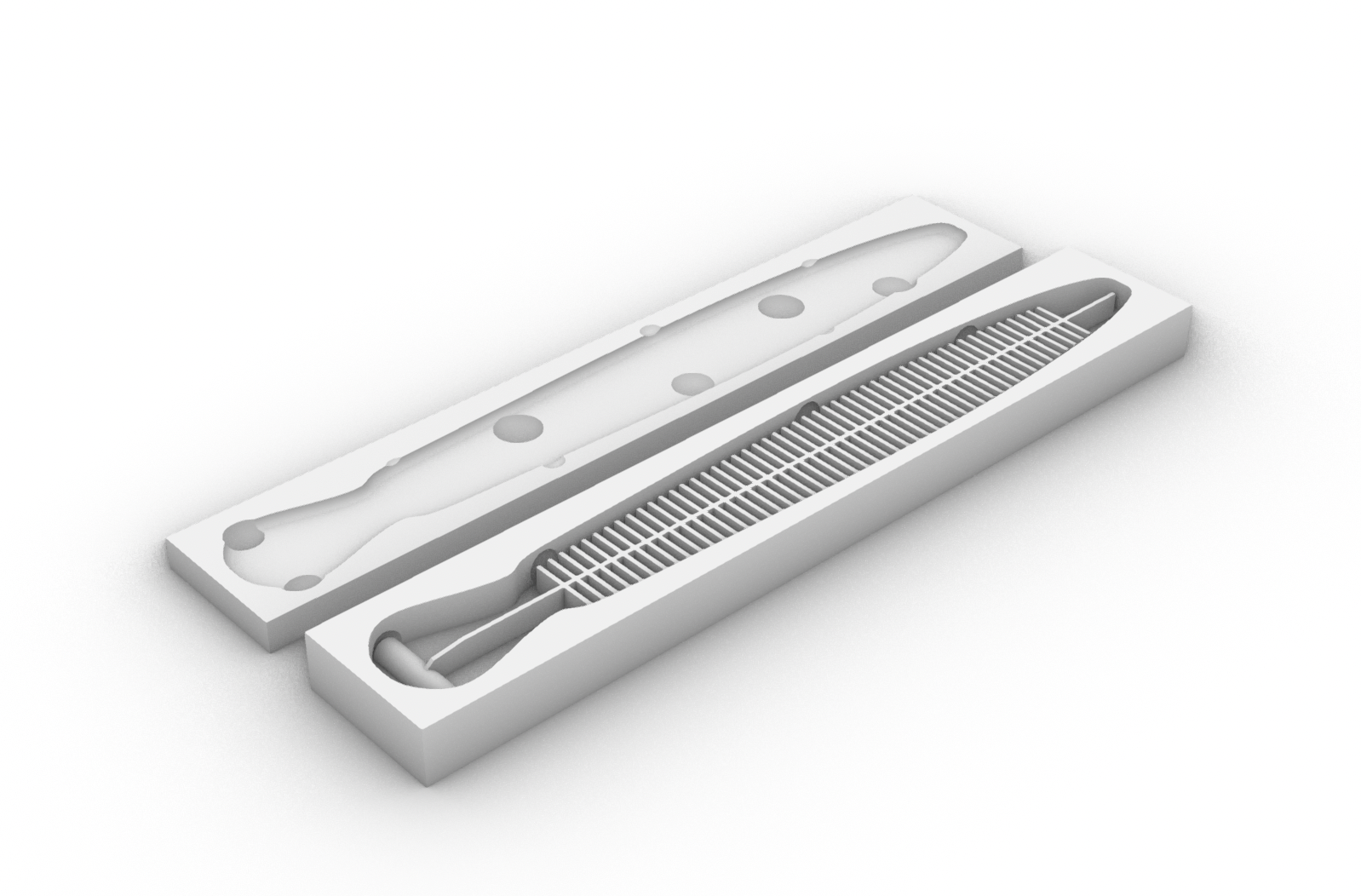
For the mold I made a box that I cut-out (boolen difference) from the original shape.
Exported as STL
3D-Print settings:
Material: PLA
Temp: 210
Layer height: 0,2 mm br
Speed: 60 br
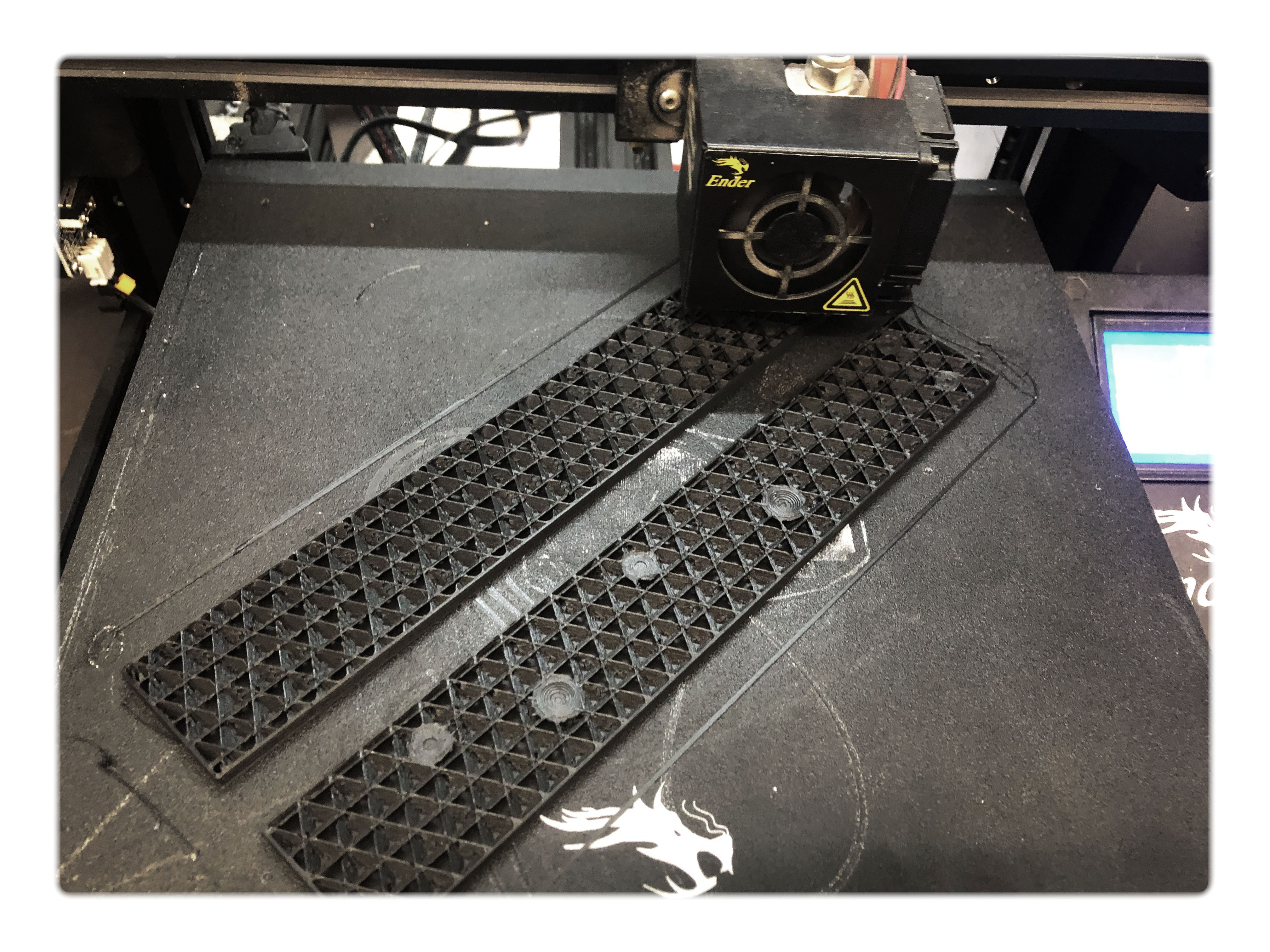 printing
printing
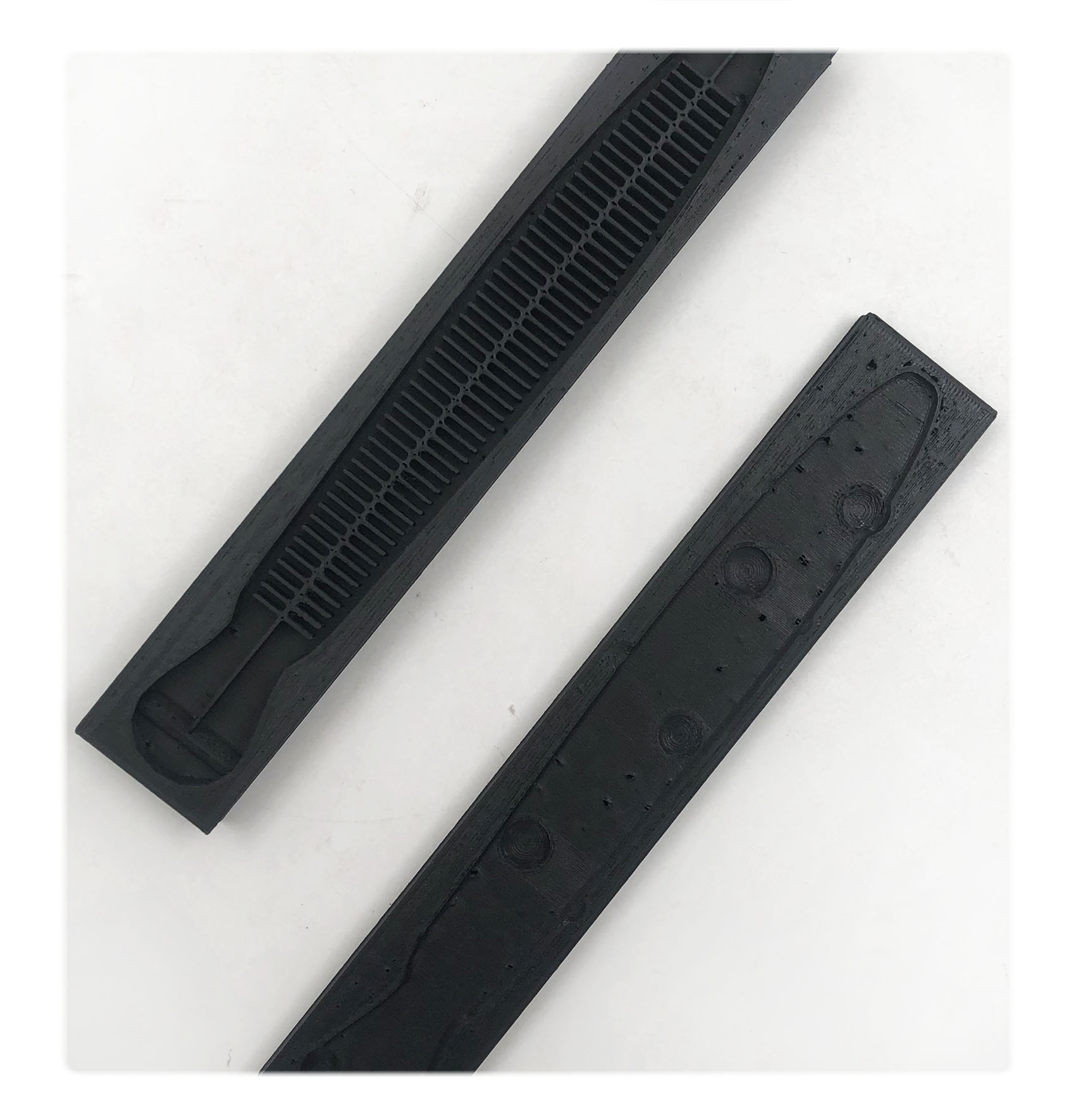 finished mold
finished mold
Molding¶
Silicone: Smooth-sil Dragon-skin 10
 Instruction:
Instruction:
1) Fill up the two mold forms with silicone
2) Let it try
3) Remove the shapes from the mold
4) Glue together the two pieces using a little bit of silicone
 finished
finished
Conclusion:¶
The syringe was not enough to fill up the full worm with air and when we tried with the compressor the cells exploded because of the high pressure.
Possibly it would have been better to use an electric fan to fill the shape.
Maybe it would also be a good idea to make the outer shell slightly thinner creating a better tensile balance between the shell and the cells.