09_SOFT ROBOTICS¶
keywords: pneumatics, pneubotics, expansion, contraction, movement, inflation, deflation, programmed feedback, kinetics, actuators, chambers, patterns, bending, shaping, environments, air, flow, gas, foam, fluid, relationships, haptics, muscles, arms, skin, touch, feel, softness, silicones, bio-silicones, bio-mimetics
_Overview¶
I find this field to be one of a technical and technological as well as one for sparkling the speculative mind flow. The aplications and possibilities of incorporating the concept of soft robotics and its principles, has been a very surprising and much intriguing topic for me this week. By exploring the movements and understanding the materials you are working with on its level, a palette of sensations and observations arose, which made me want to investigate the topic in the future even more.
So what are soft robotics? A general definition of soft robotics presents it as a subfield of robotics, that integrates compliant materials, soft and flexible, instead of rigid and stiff ones, into its fabrication. This difference in materiality is what allows the parts and links of robots, and by that, their functioning and purpose, to act and perform in different environments, handling things with great care, and by that, bringing them closer to human interaction.
General references:
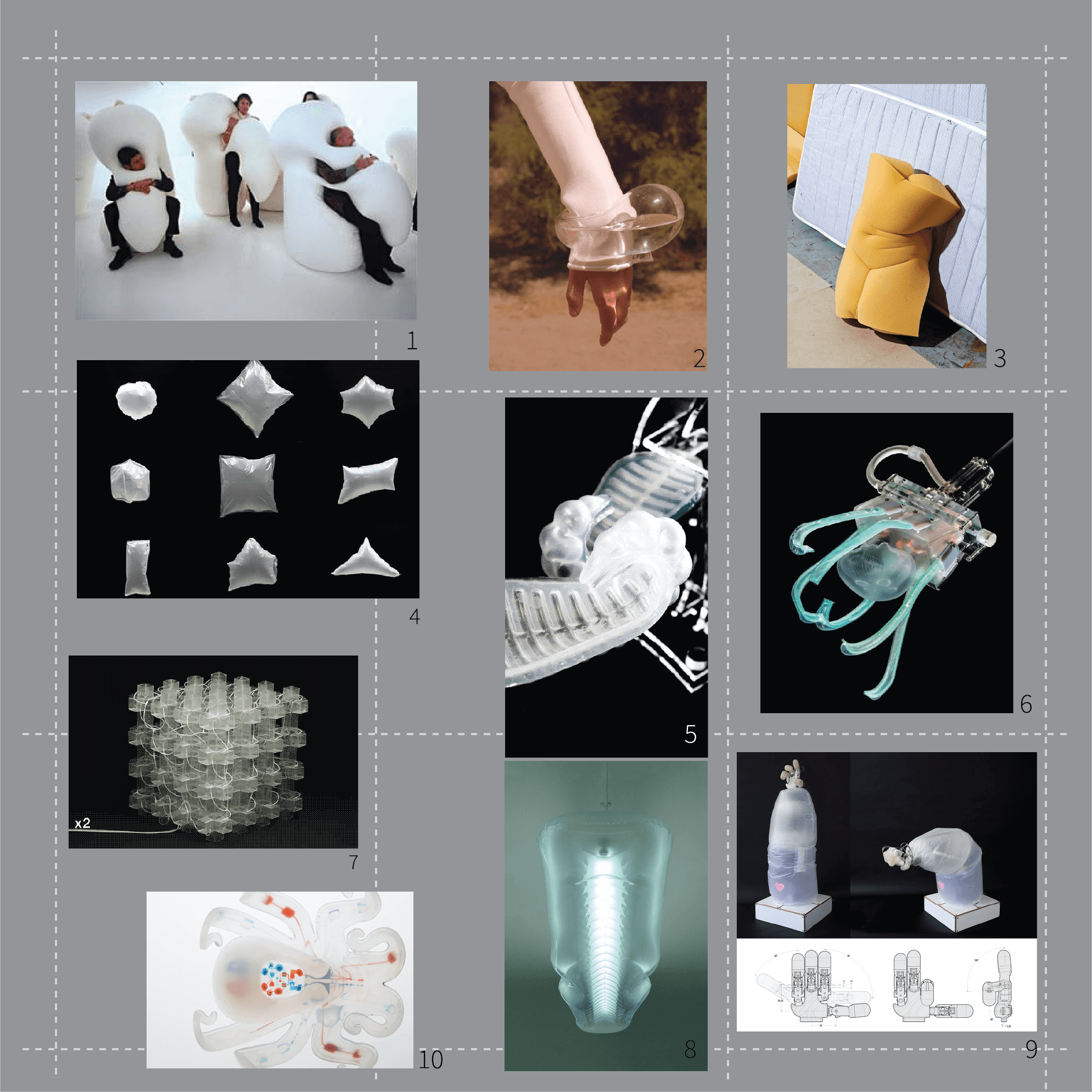
1 – Ernesto Neto - Humanoids
2 – Speculative design
5 - Bijing Zhang & Francois Mangion, Furl: Soft Pneumatic Pavilion
6 - Scientists Made a Robotic Hand So Soft It Can Handle a Jellyfish
7 - Shape-shifting matter could let houses crumple themselves away
9 - Disney Research Designs Robotic Arm Closely Resembling Baymax
11 - Xenobots, First living robots made from frog cells
_Fields of application¶
-
Medical robots
-
Search and rescue
-
Agriculture
-
Architecture
-
Different technological industries
-
Underwater exploration
-
Wearable technology
-
Assistive robotics
-
Food industry
-
Soft grippers in manufacturing
-
Space exploration
-
Handling toxic materials
-
Human-Robot interaction
-
Speculative design
_Principles and materials¶
Principles and responses of soft robotics:
-
Fluid actuated
-
Airflow actuators
-
Microbial fuels
-
Chemical reactions
-
Electro-chemical pressures
-
Thermal actuation
-
Magnetic actuation
-
Biodegradable actuators
-
Energy driven
-
Bringing stuff to life
Feedbacks:
-
Programmed actuation
-
Inflation, deflation
-
Vaporisation
-
Movements: bending, pressing, flexing, moving, shaping, swirling..
-
Structure change
-
Kinetic responses
-
Programmed orientation
Materials:
-
Materials transforming structure
-
Silicone elastomers
-
Bio-silicones
-
Foils
-
Rubbers
-
Foams
-
Hydrogels
-
Shape memory polymers
-
Fabric materials
-
Pneumatic networks
-
Fiber-reinforced elastomers
-
Liquid metals
-
Conductive polymers
-
Muscle wires
-
Organic materials and biodegradable polymers
-
And many more
_Exercises¶
Air in combination with different materials, was our main source for designing prototypes this week and getting to know the basic principles of soft robotics.
Final project Unflatables by Saskia Helinska
_Heat-transfer vinyl¶
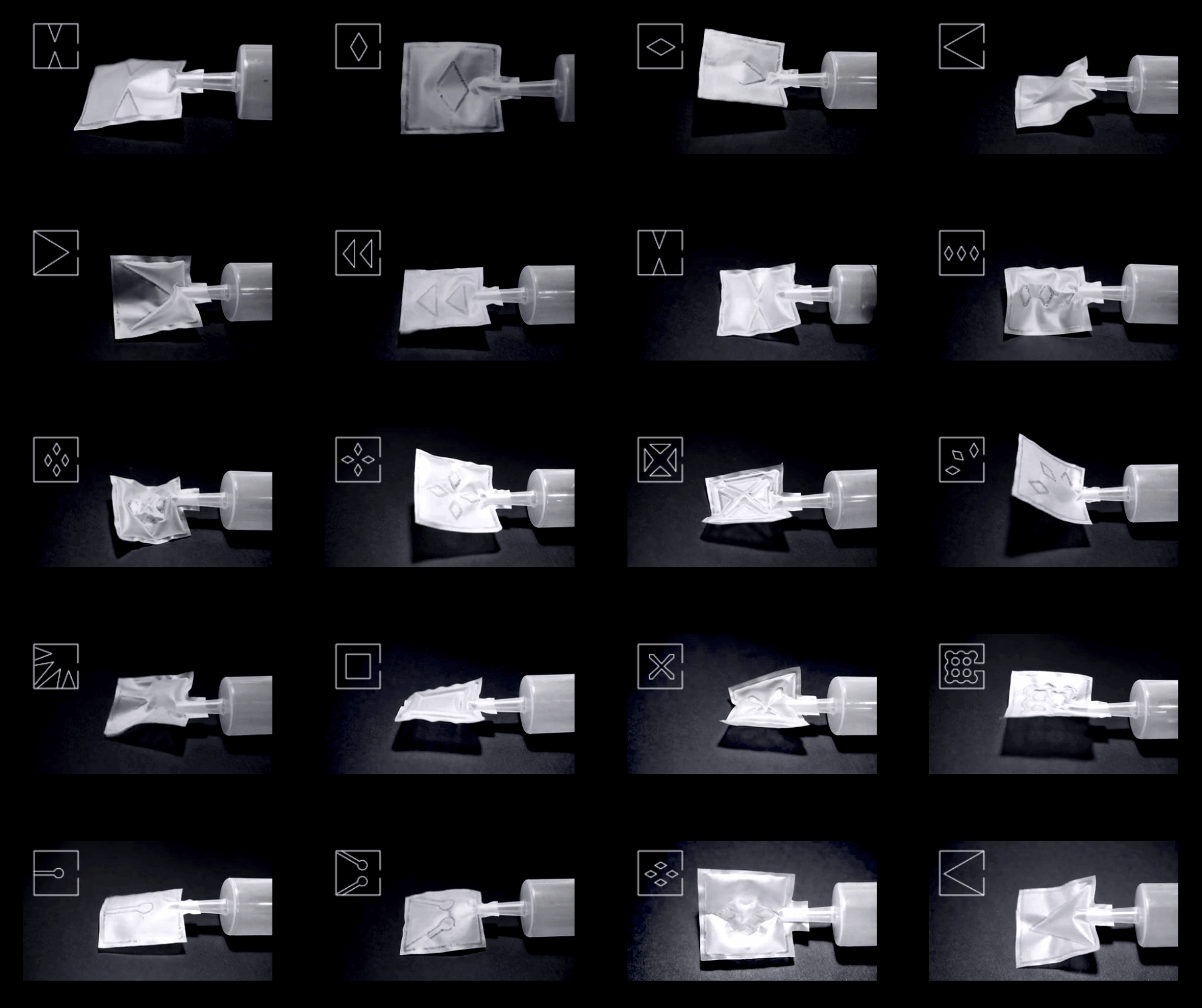
Inflatable samples and feedback movements

This one was fun, a pneumatic linear actuator.
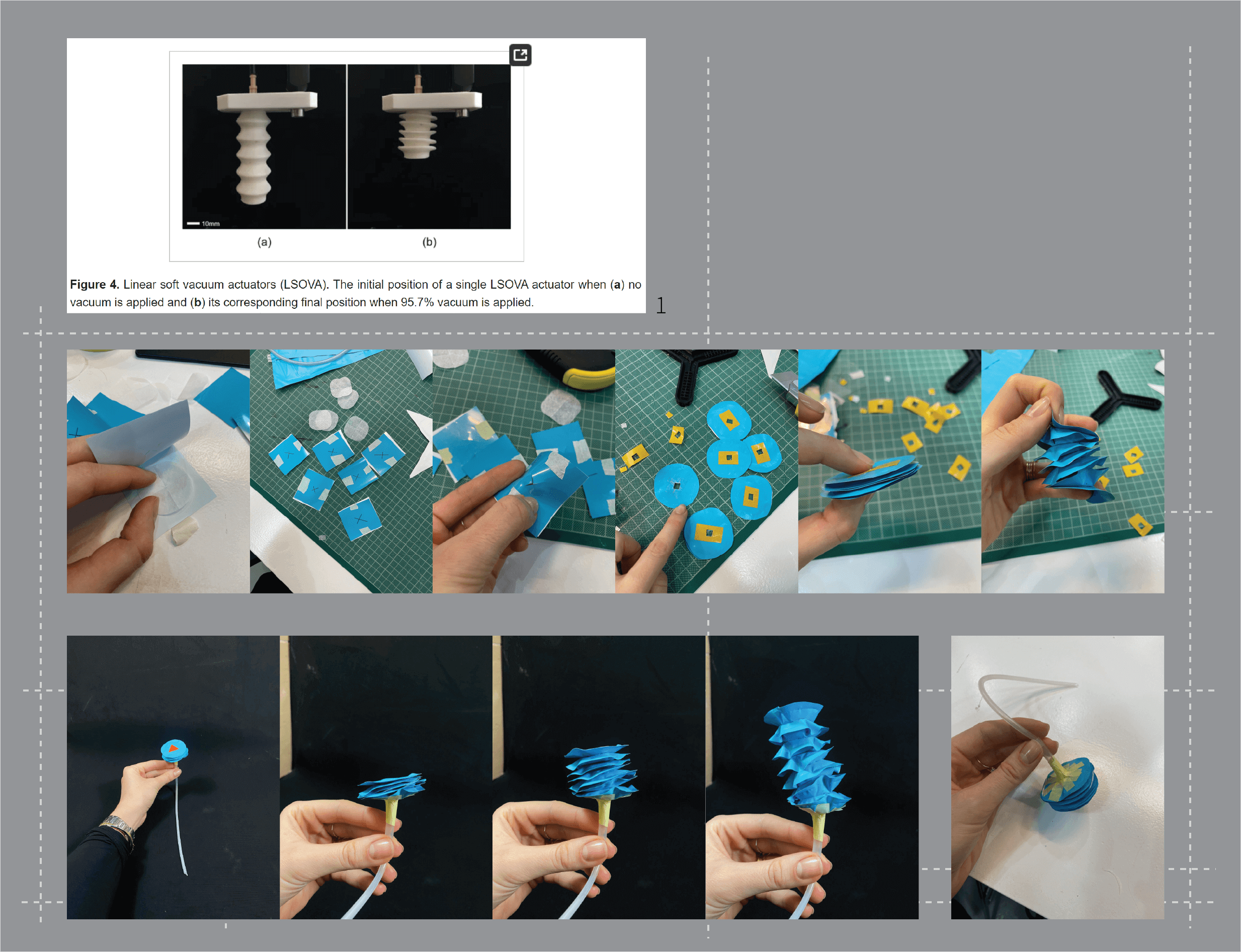
Video of linear air actuator
_Silicone¶
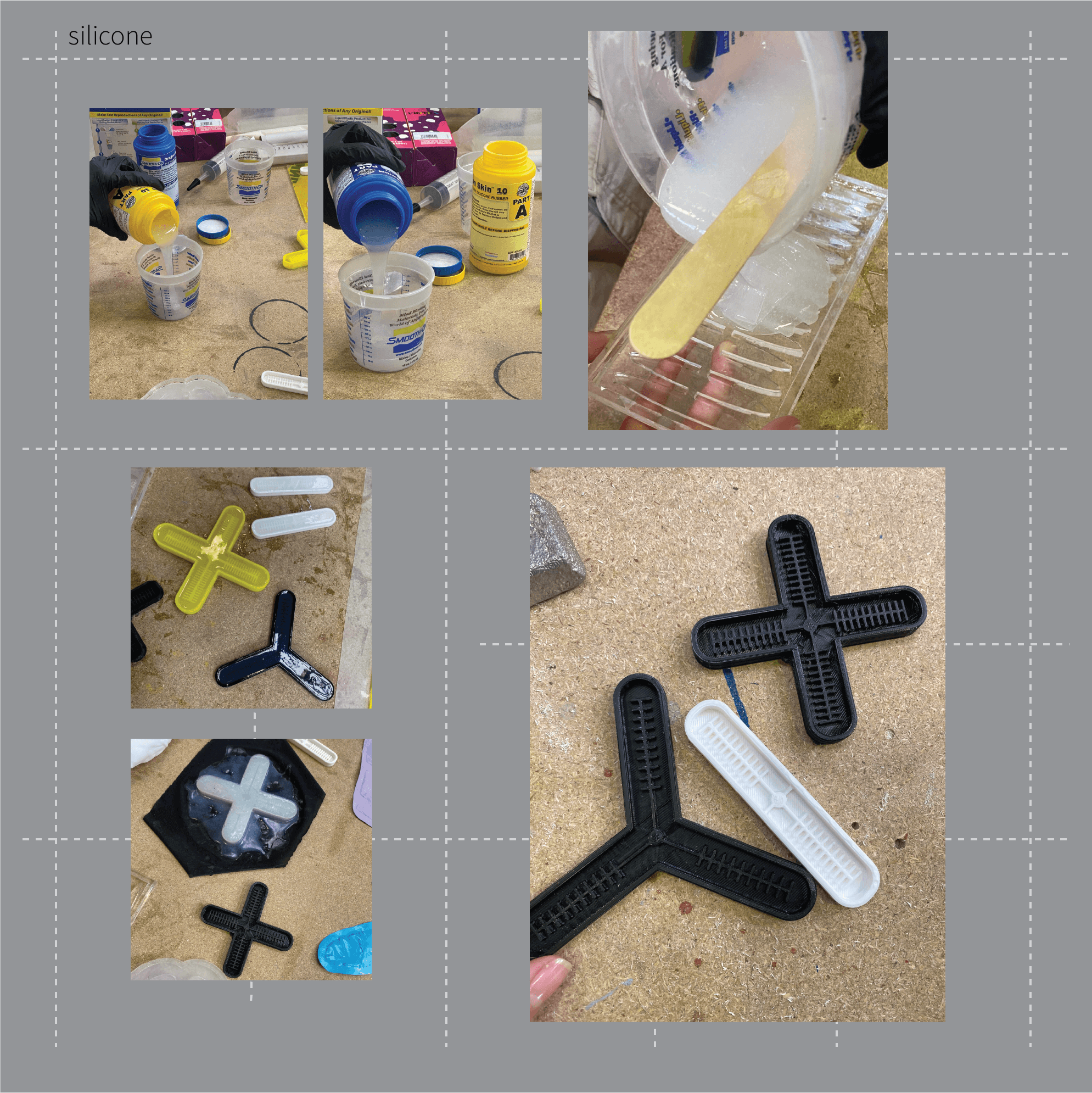


Video silicone arm moving, walking...
_Bio-silicone¶
The recipe for making a very flexible biomaterial, I found on Cristina Dezi's page. It is made of three ingredients, water, gelatine and glycerol. I also modified it a little bit, and added some charcoal to some of them, to find out, if I could make a conductive bio-silicone. The samples at the end were not conductive, but will try again! One good trick when casting biomaterials is to pour the wet biomass through a textile. This prevents the bubbles and foam to be mixed in the sample. Here I used a piece of left over silk that can be used again.
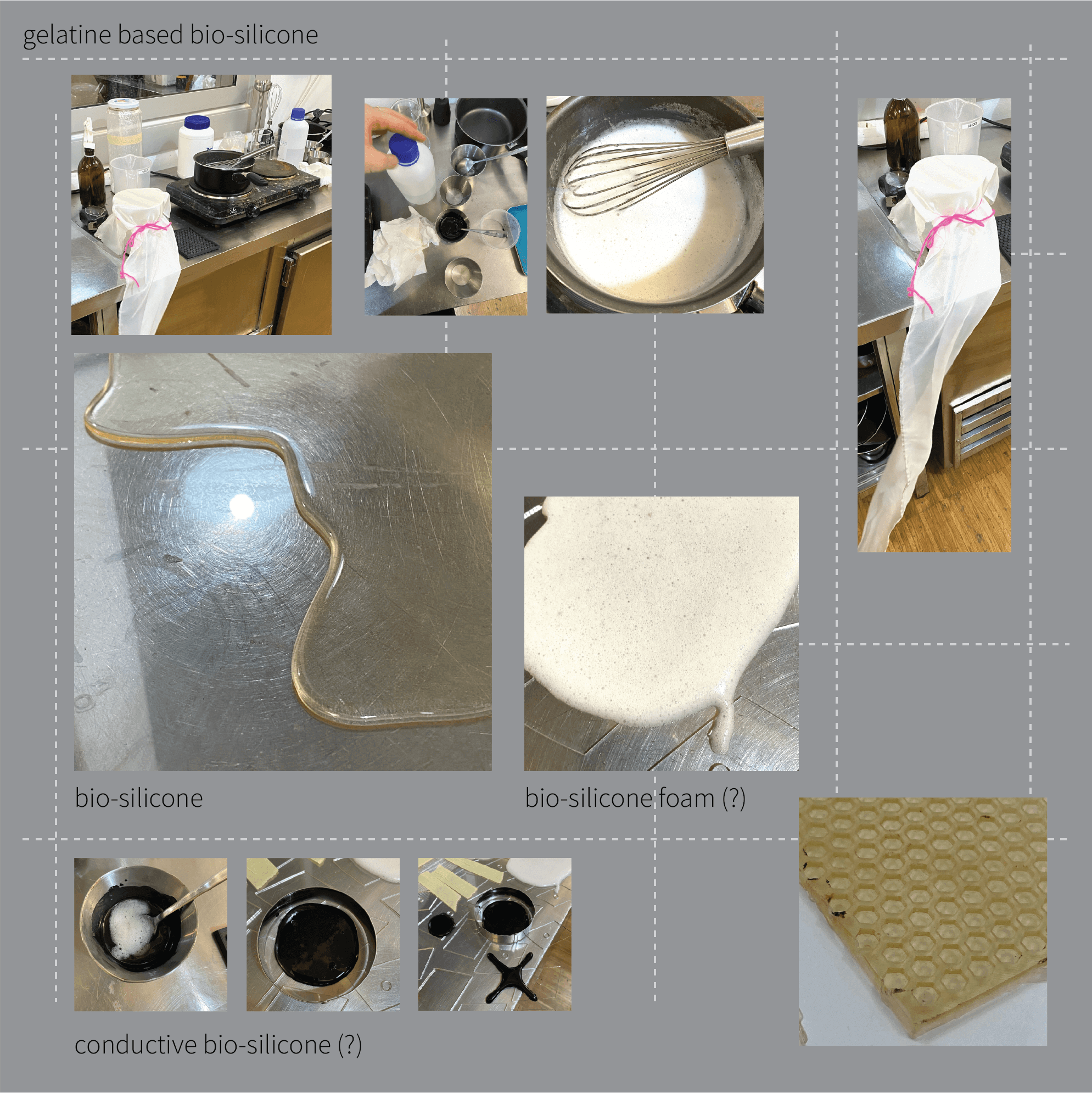
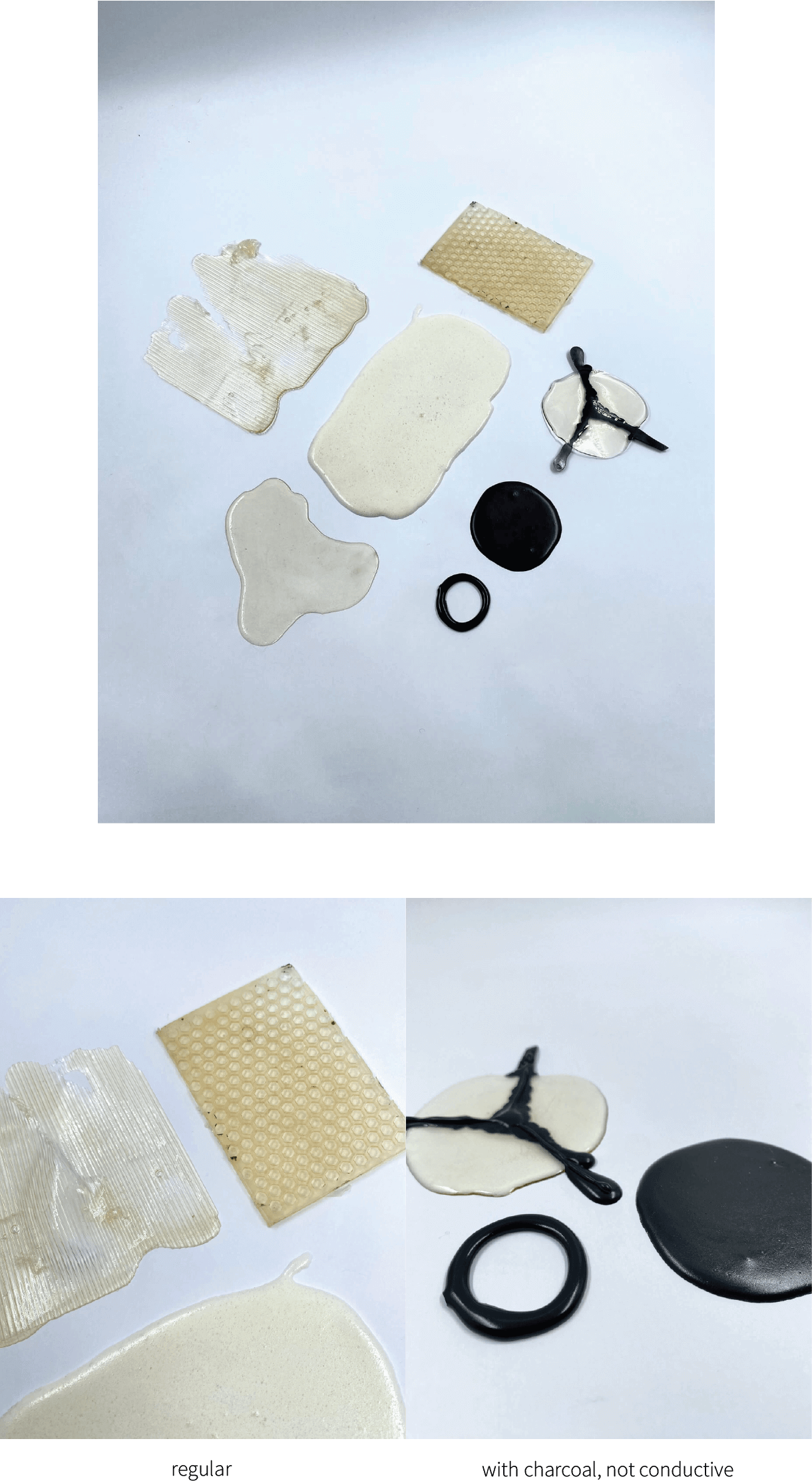
Recipes for bio-silicone:
Recipe 1:
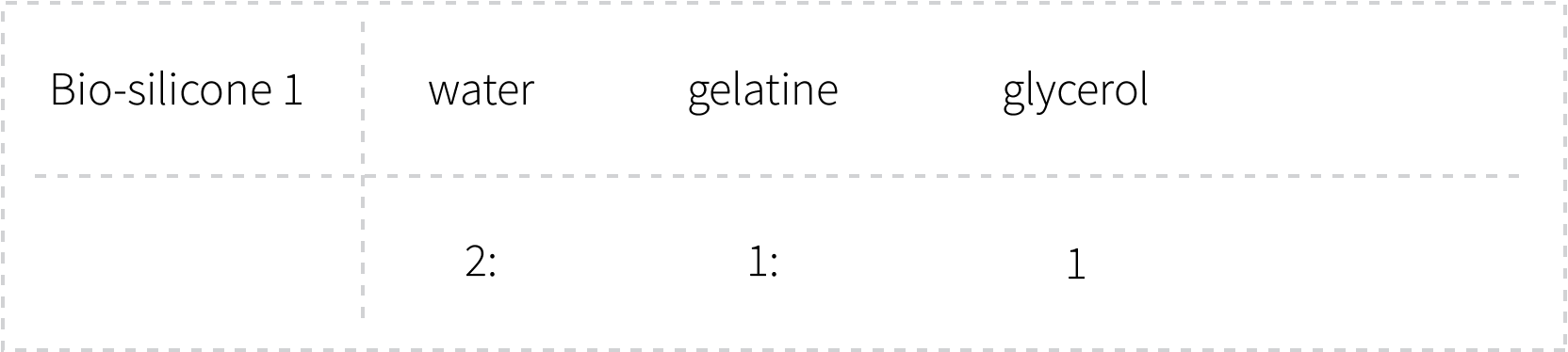
Characteristics: Sticky, bendable, foldable, can return back to its initial form, flexible but can easily tear.
Recipe 2:
Characteristics: Sticky, bendable and flexible, but a little bit more brittle than previous one. The charcoal powder might be the cause for that.

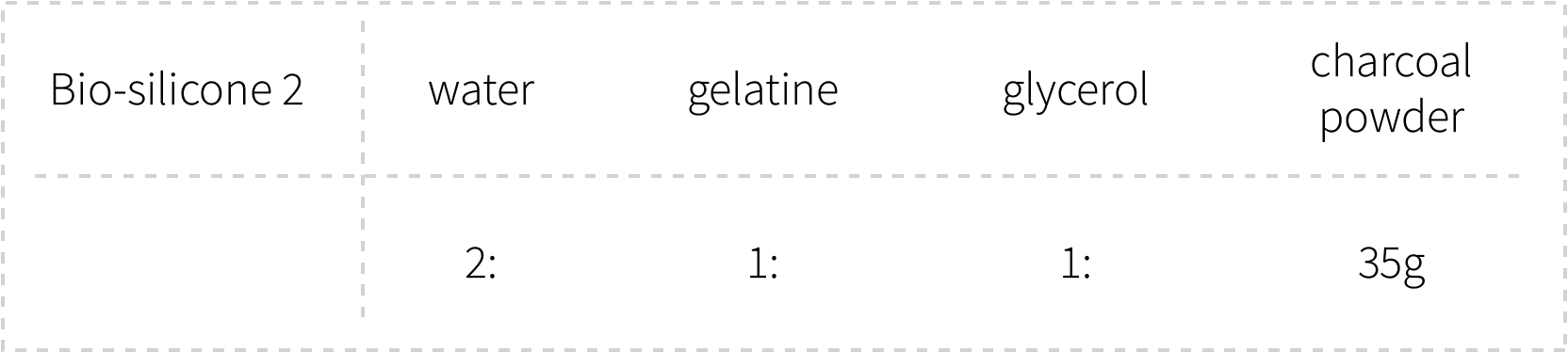
The foam silicone was made from the foam resedue, which is created when by whisking the gelatine and water. It is sort of a by-product when making gelatine-based biomaterials.
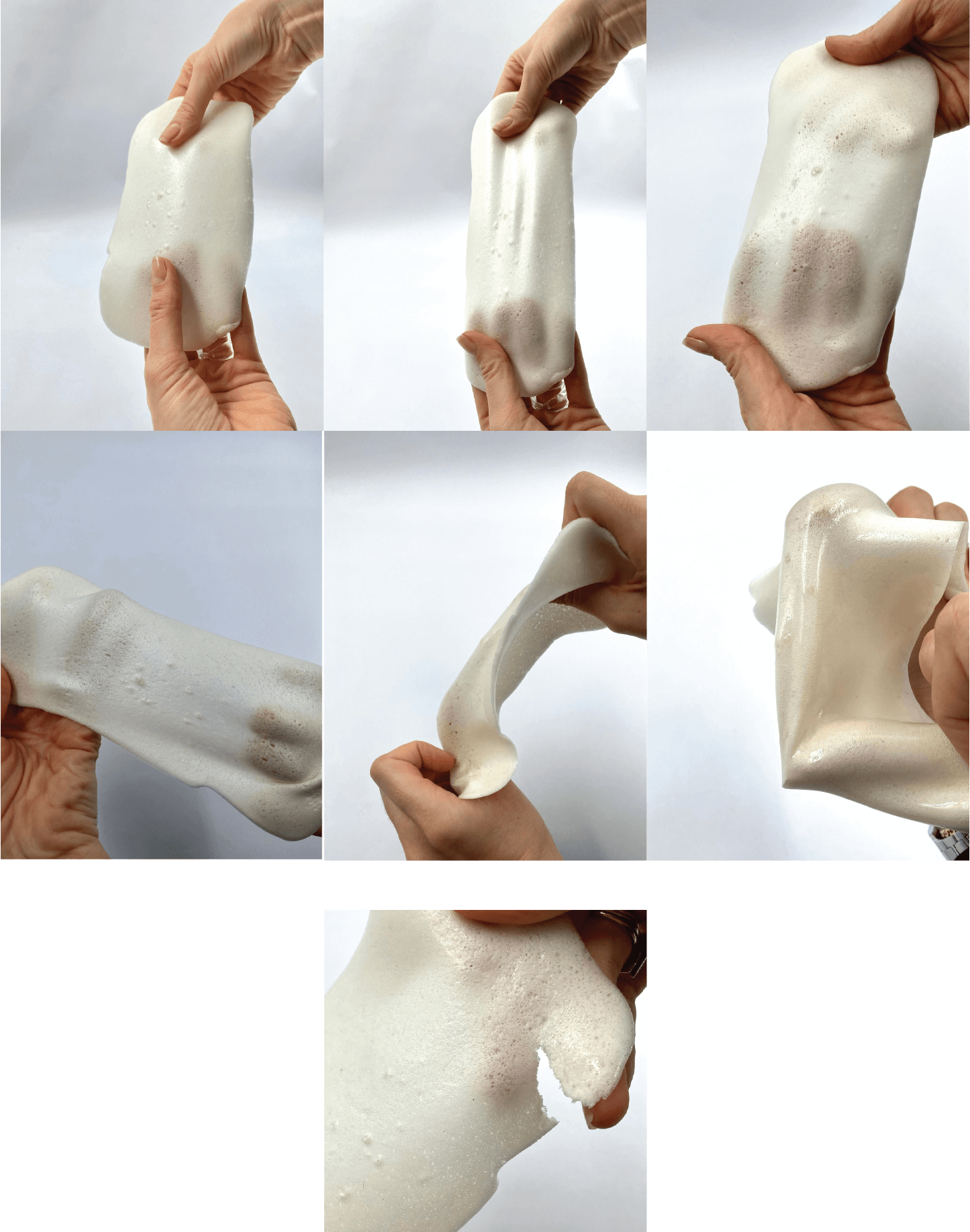
Characteristics: Flexible but not as sticky as the regular one, would say due to air bubbles. It felt a little bit thicker and softer to touch. There was quite a lot of pressure applied to it, but eventually it tear apart in the corner.
_Field of interest¶
Soft robotics in behavioural science and therapy design or Design for Therapy, through soft material and movement research.

Inspirational projects

1 - Jann's Choy Inflatable mask
2 - Sheryl Teng, Pneumatics Touch
3- Rui Sun, Emotional First Aid Kit
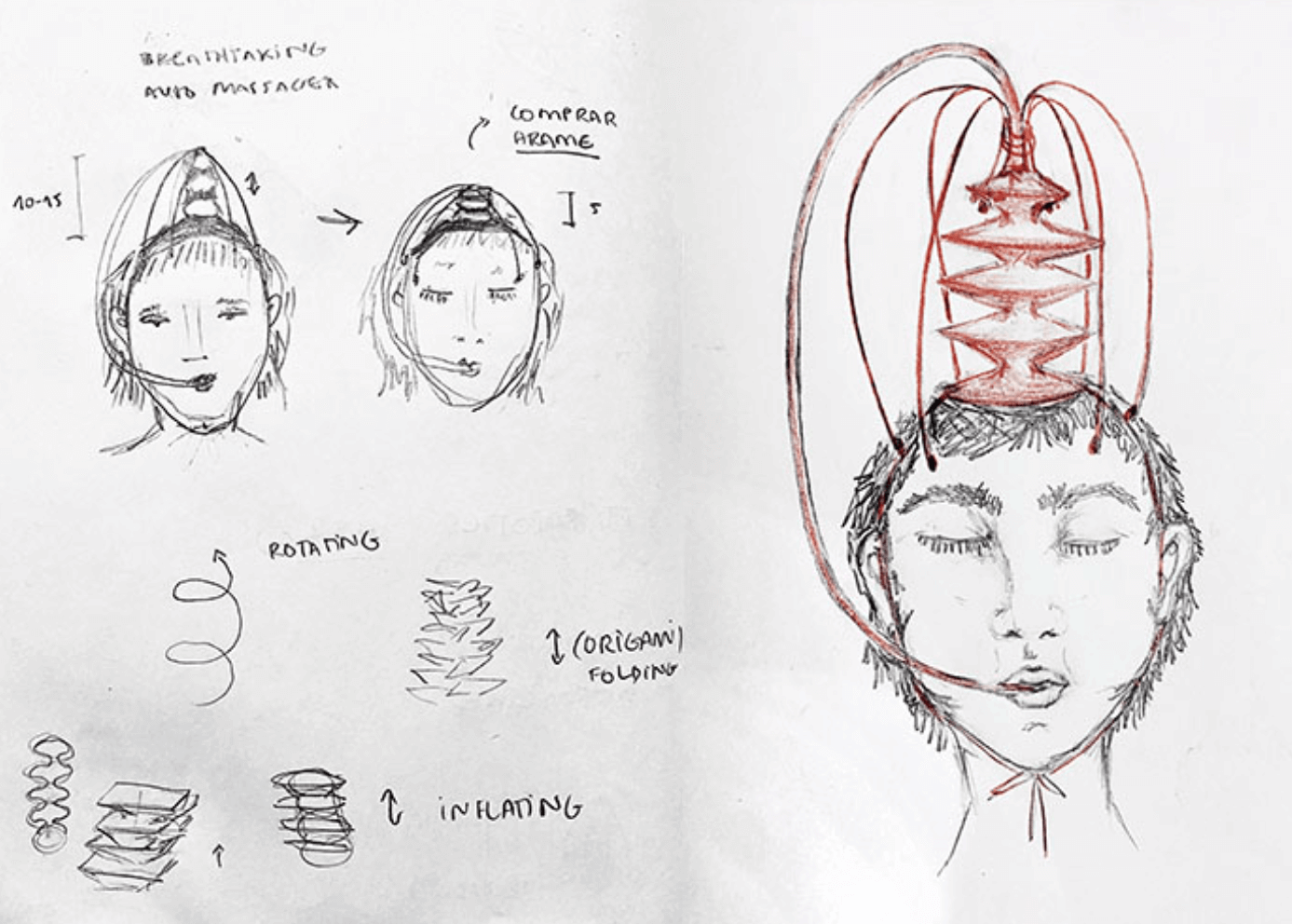
4- Clara Acioli, Breathtaking automassager
_Ideation¶
Soothing movements and flower power
One thing that stuck with me after the research, was moments when I caught myself being mesmerized by the movements of air actuators and balloons designed. We also had a lot of fun and joy creating these prototypes, so I wanted to do something joyful and light for the final prototype. I picked some of the movement inspiration we can find in nature and wanted to describe the feeling I would like to create with airflow and balloon actuators with deflation and inflation movements.
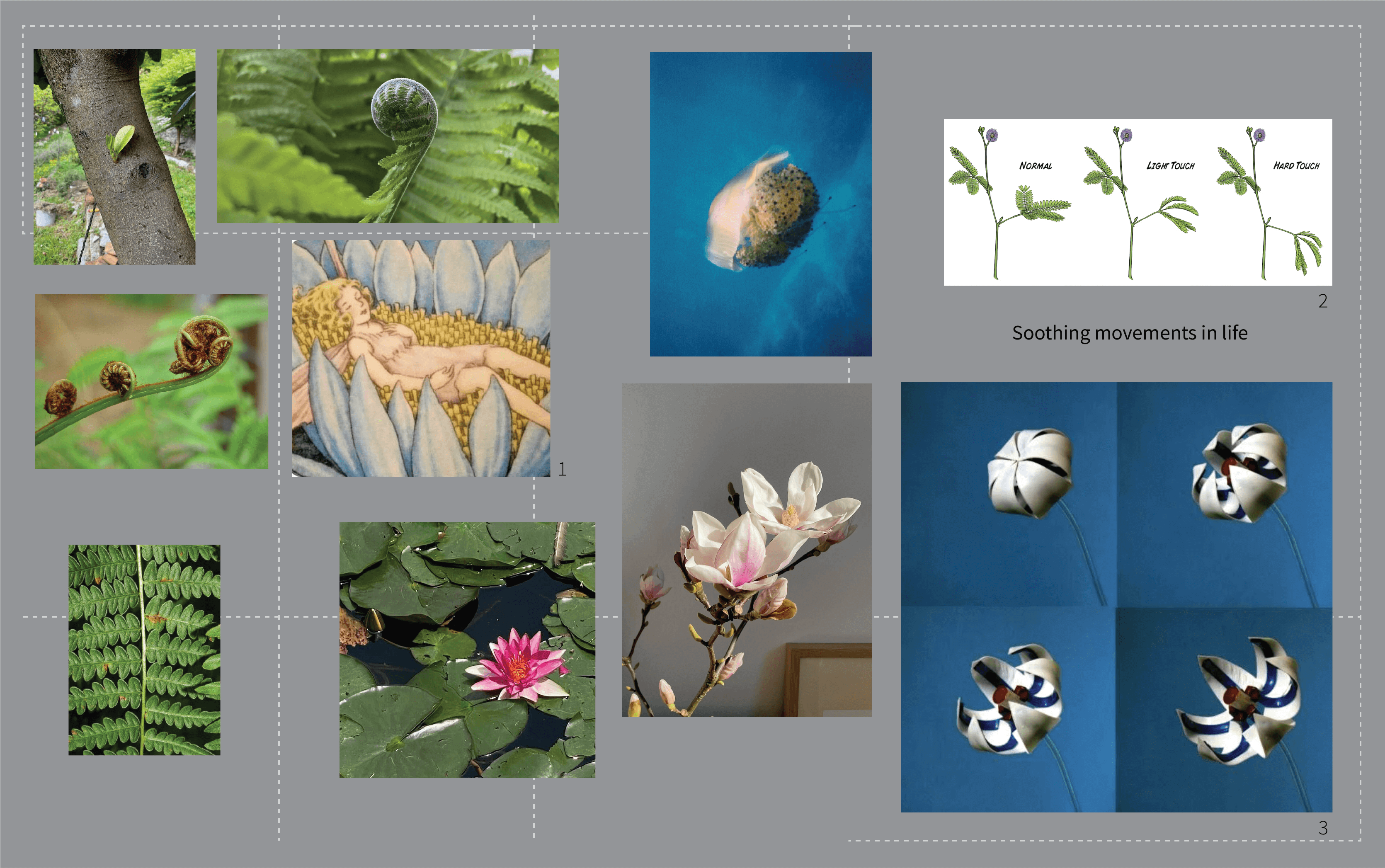
1 - Illustration by Ida Rentoul Outhwaite
2 - Image credit: Sensitive Mimosa Pudica Electrophysiology
3 - Soft Robots: 3D Printing Artificial Muscles
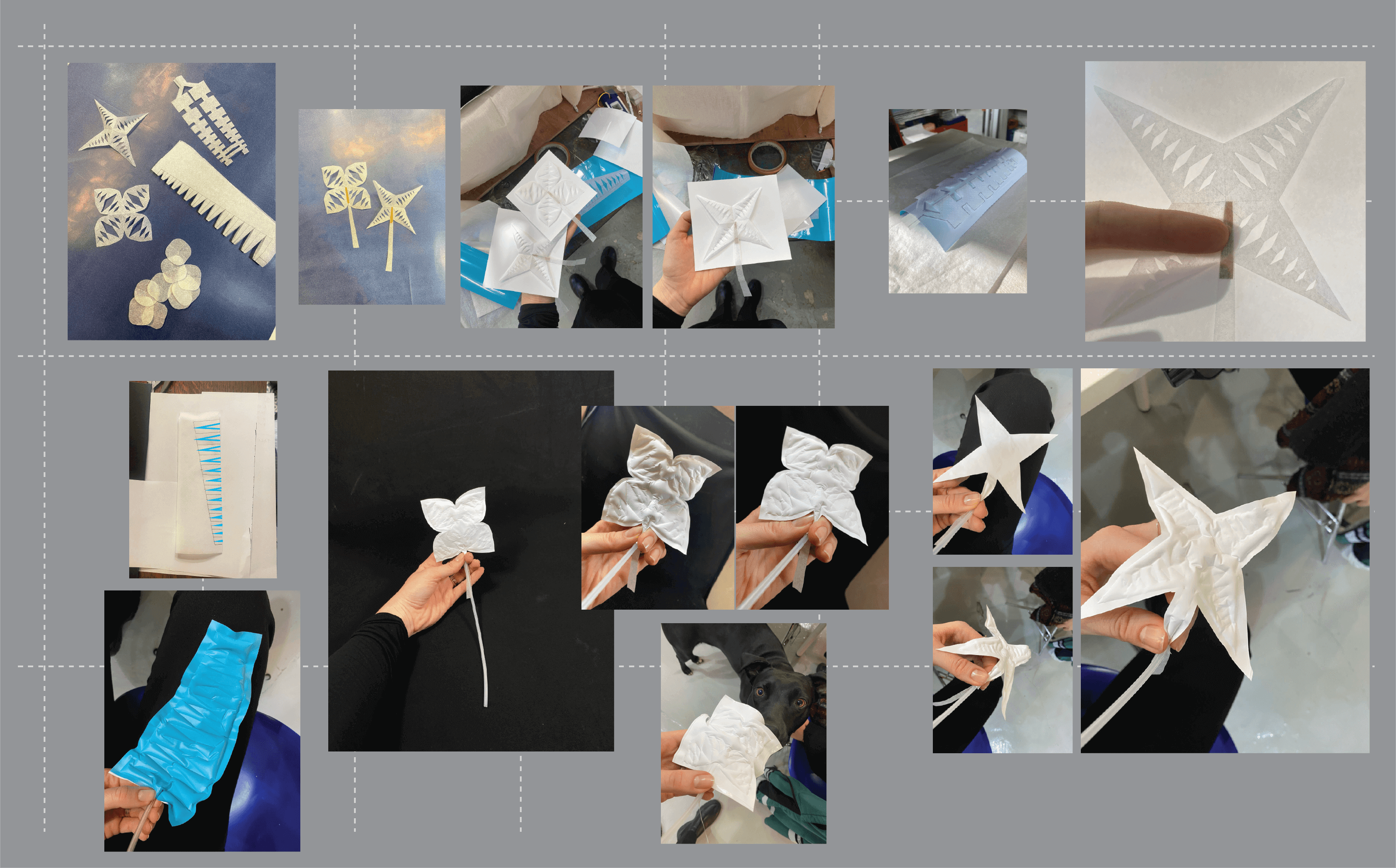
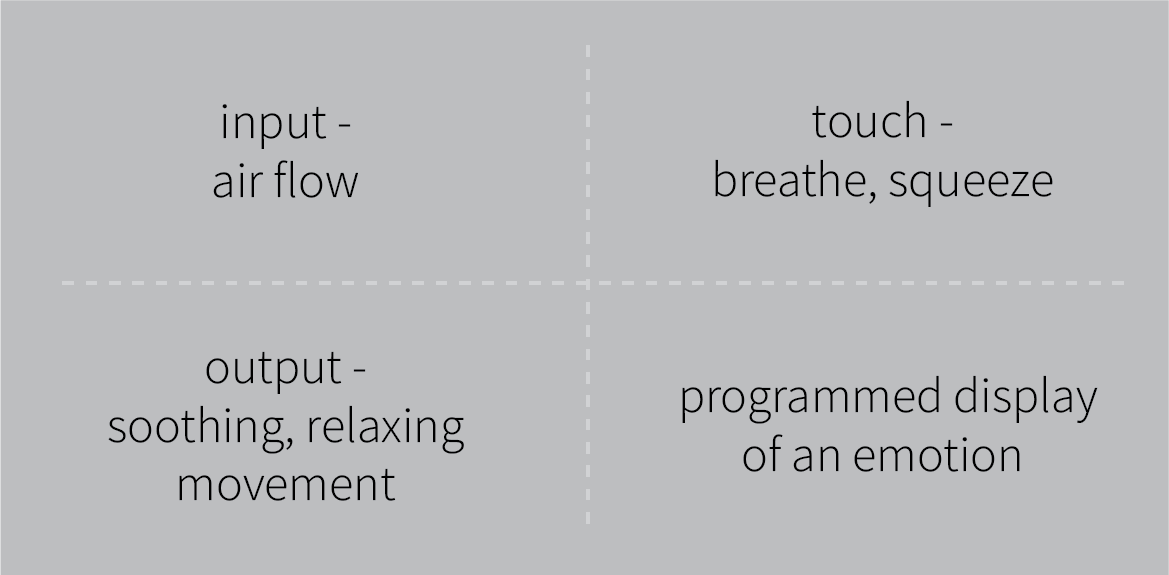
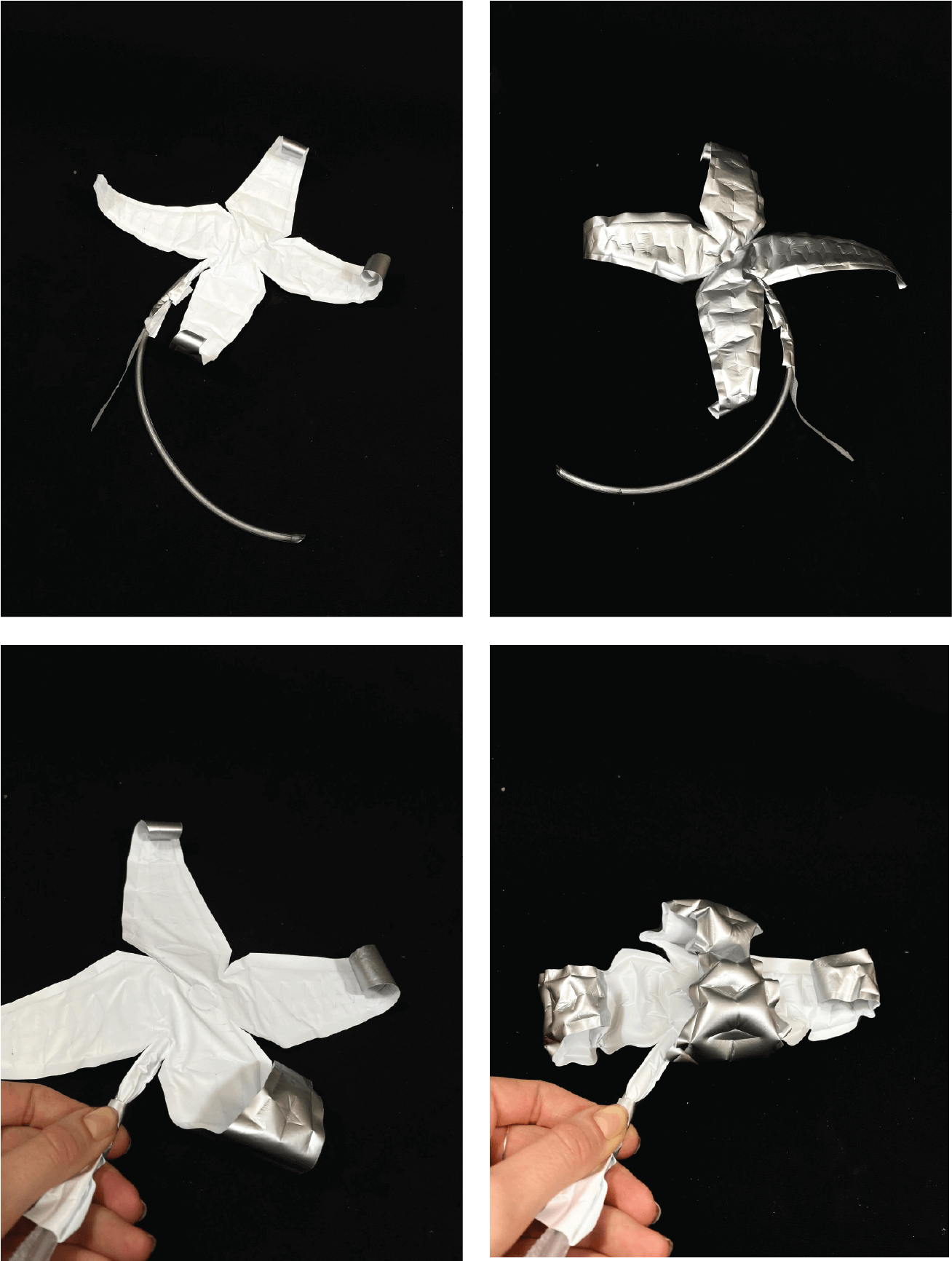
Working with airflow, the idea was to make a therapeutic flower that opens up and closes depending on the breath implied or by squeezing the pump attached. An object to use in times of distress is meant to soothe the mind in the form of a breathing exercise and by looking at the relaxing movement of the flower. I wanted to sum up the idea of bringing soft robotics closer to humans, the one of displaying emotion through movement, which was presented by in our global lesson previous week.
Since this week was full of exploration and just scratching the surface of such a broad topic, this prototype just resembles the idea. The flower is made with white and silver heat-transferable vinyl.

Materials used:
- Heat-transferable vinyl in white and silver
- Baking paper
- Silicone tube
- Tape
Tools used:
- Heat press machine
- Scissors
Process¶
-
Cutting the model out of baking paper
-
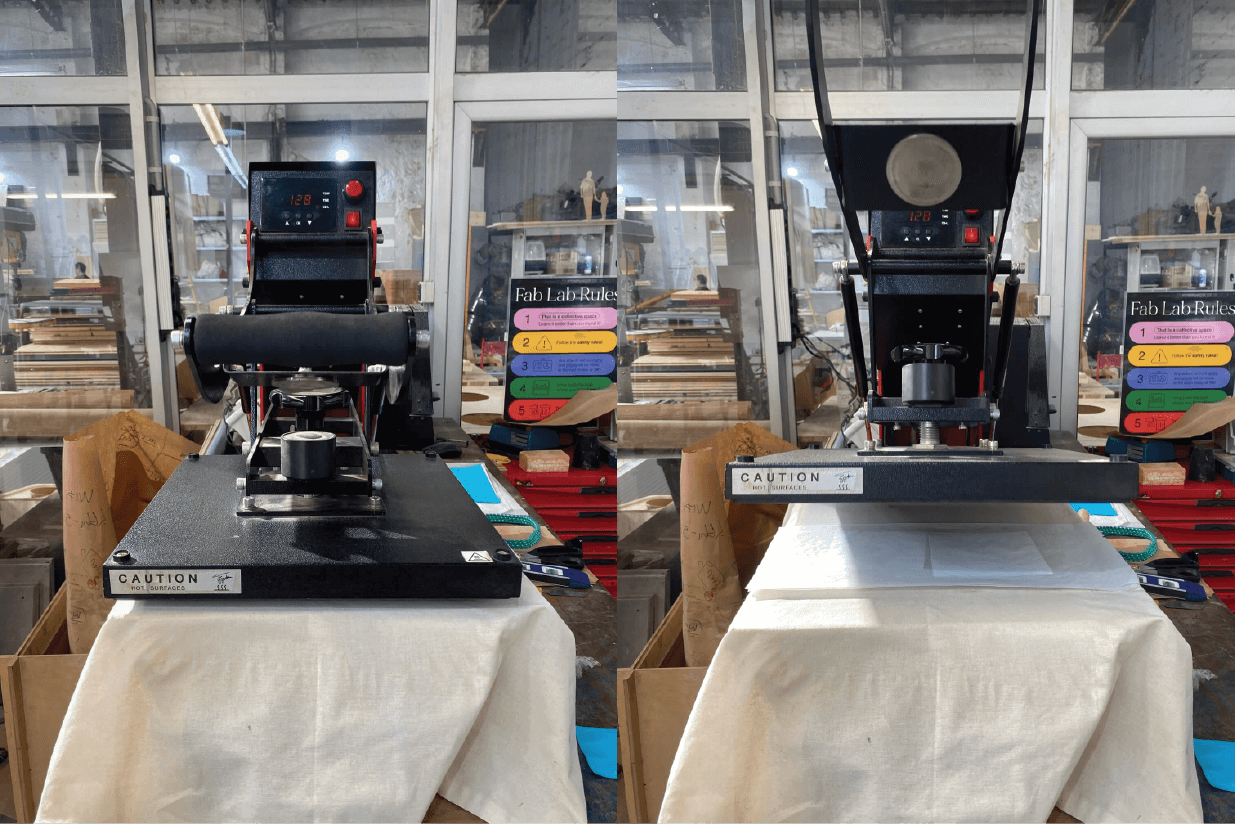
Placing the model in between the two vinyl foils
-
Heat pressing the vinyl sandwich twice, for 20 seconds at 155 °C
-
Removing the outer foil of the vinyl
-
Cutting the edges of a flower
-
Placing a tube to inflate the model

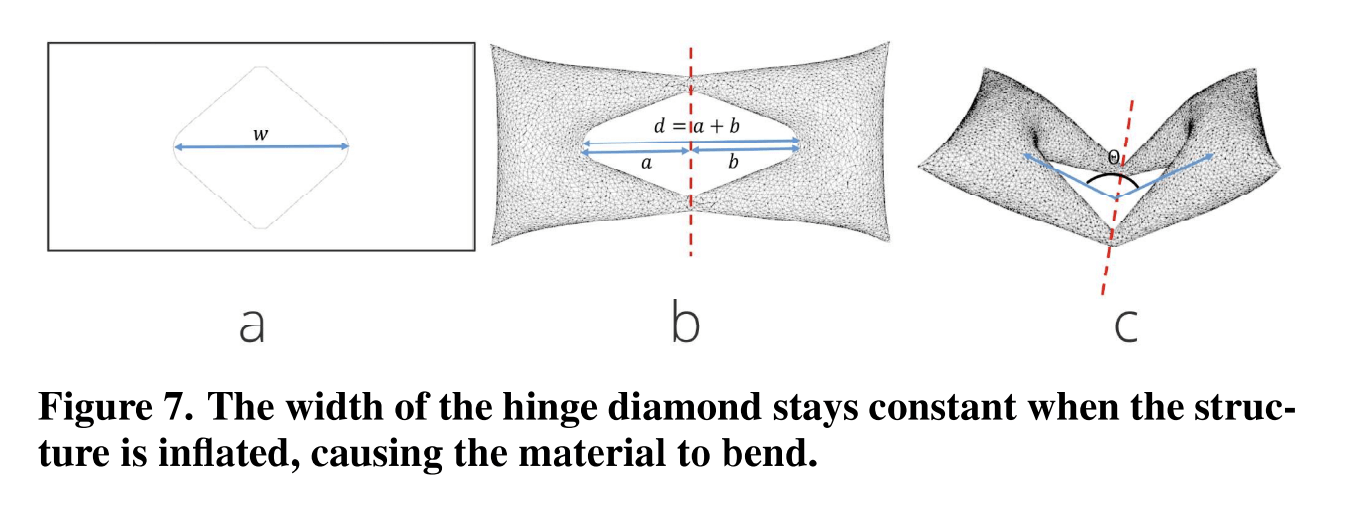
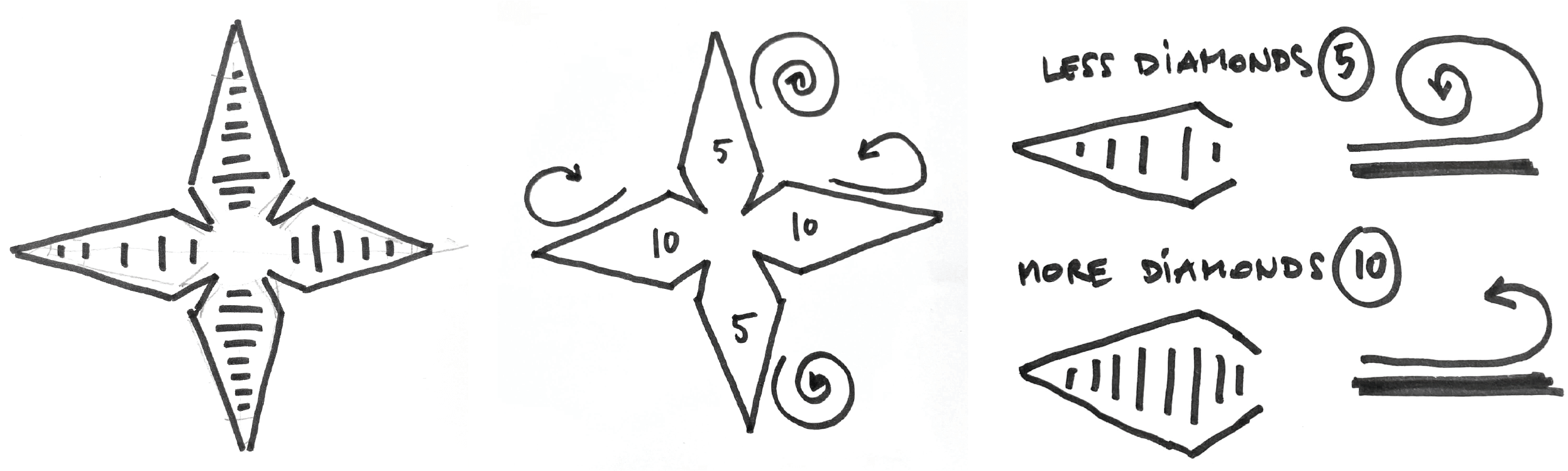
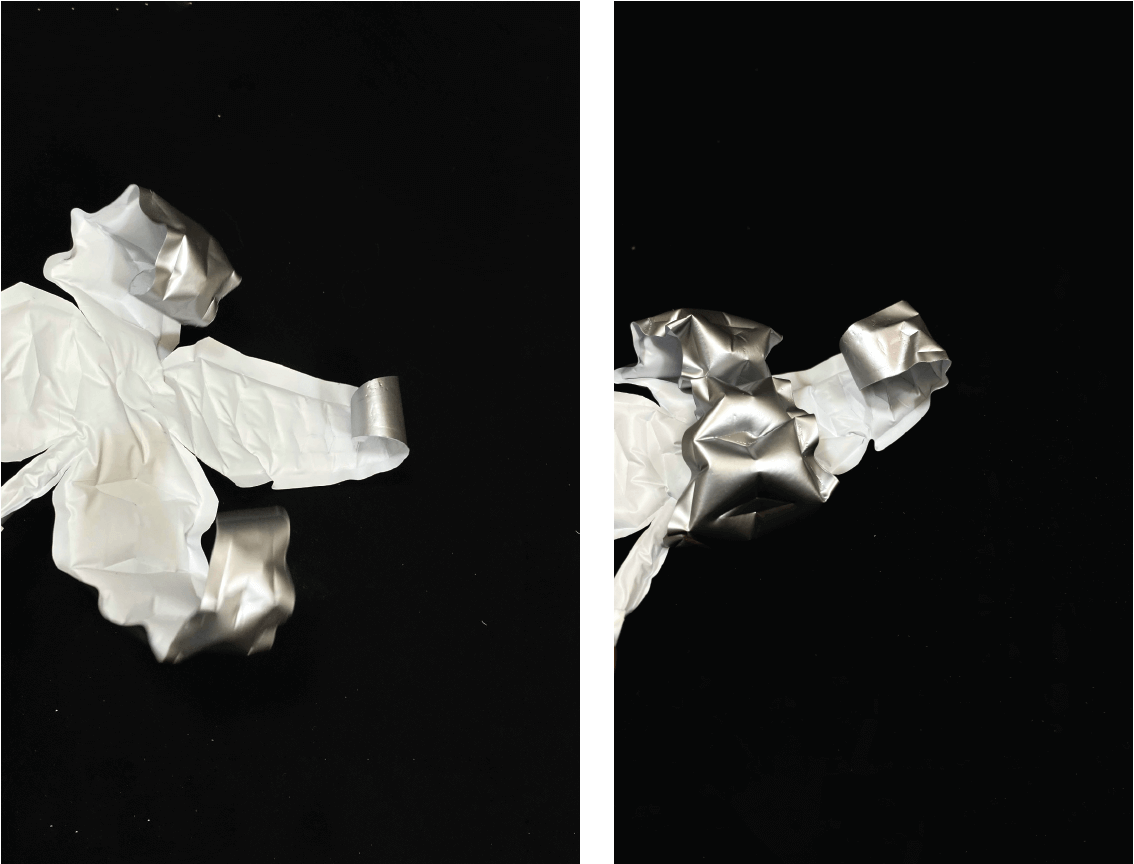
For this prototype, I used two different numbers of diamonds to test the swirl effect of the flower leaves. The one with fewer diamonds bended more, which was the effect, and movement I wanted to achieve. For the next prototype I would use just 5 diamonds on each leaf to creat a full closure of the flower.
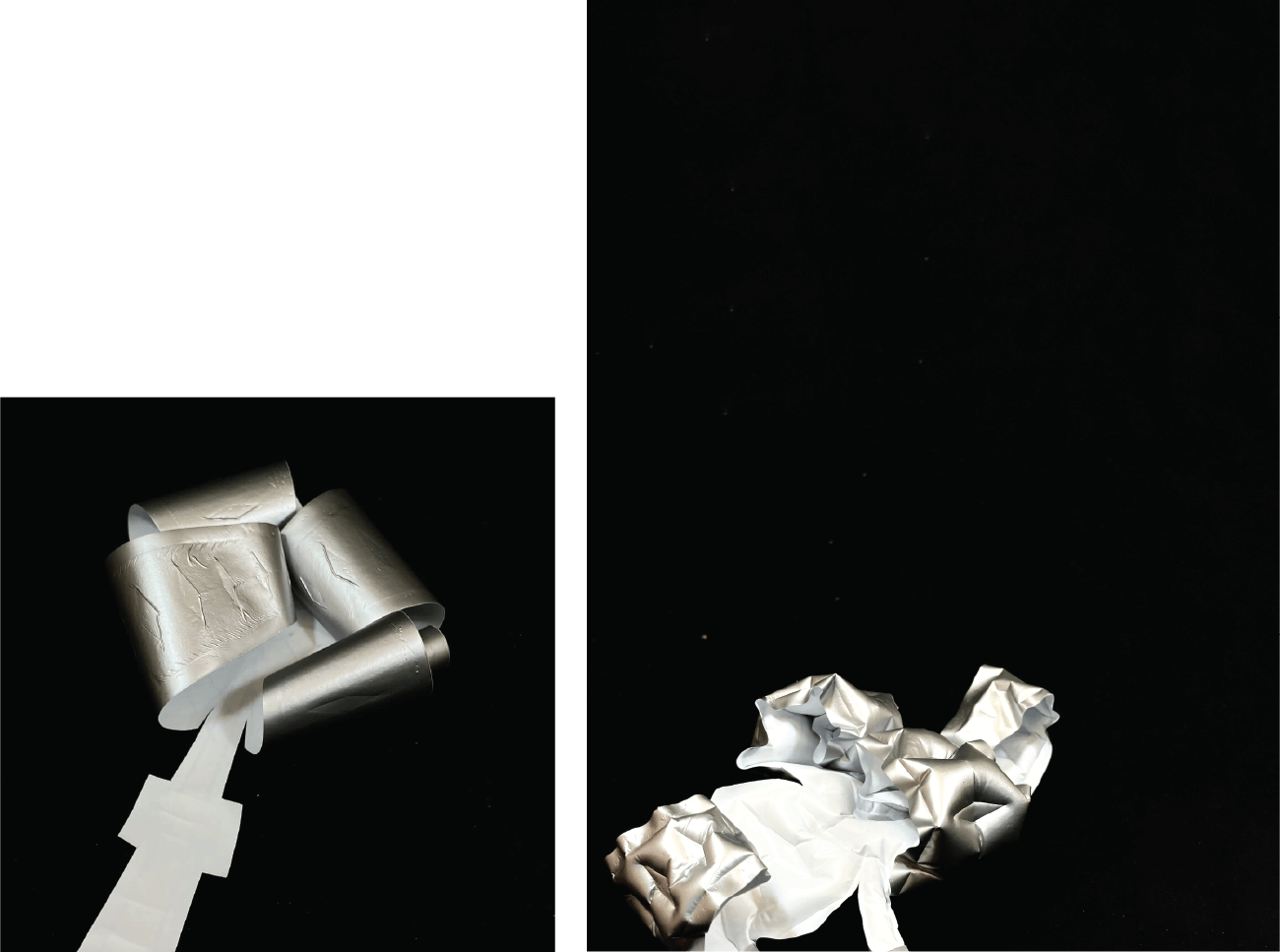
Due to the size of the file, a video of the moving flower can be found here
The flower being flipped upside down acts as a grabing arm, tool.
_More to explore¶
- I would like to explore liquid actuators and different relations between materials and movements